Hungrig oder müde? Der kleine Roboter flippt richtig aus, wenn er geweckt wird oder ihm sein Lieblingsessen angeboten wird - Metall!
Einmotorige Projekte können mit folgendem Zubehör umgesetzt werden:
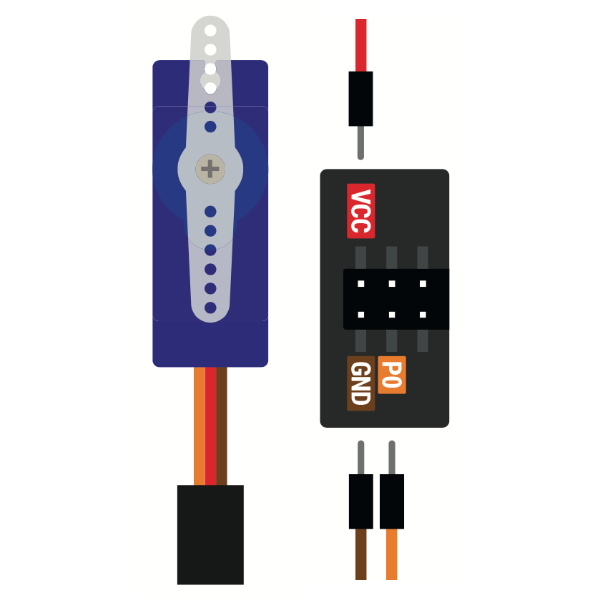
Verbinde die 3 Kabel des Servomotors mit zusätzlichen 3 Jumperkabeln. Stecke die Jumperkabel mit den Metallstiften in die Pinleiste des Calliope mini:
Schwarzes Kabel: GND
Rotes Kabel: VCC
Orangenes Kabel: Pin P0
Servo-Erweiterung:
Codeblock:

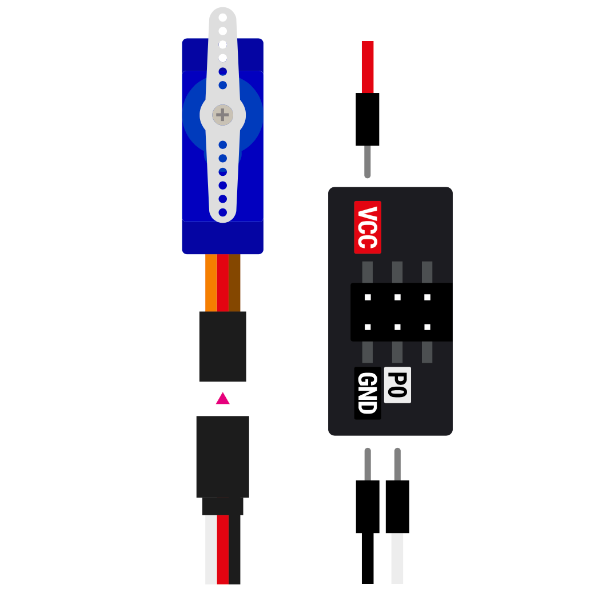
Verbinde den Stecker des Servomotors mit dem Adapterkabel.
Beachte die Farben der Kabel - dunkel=dunkel | rot=rot | hell=hell.
Stecke die Jumperkabel mit den Metallstiften in die Pinleiste des Calliope mini:
Schwarzes Kabel: GND
Rotes Kabel: VCC
Orangenes Kabel: Pin P0
Servo-Erweiterung:
Codeblock:
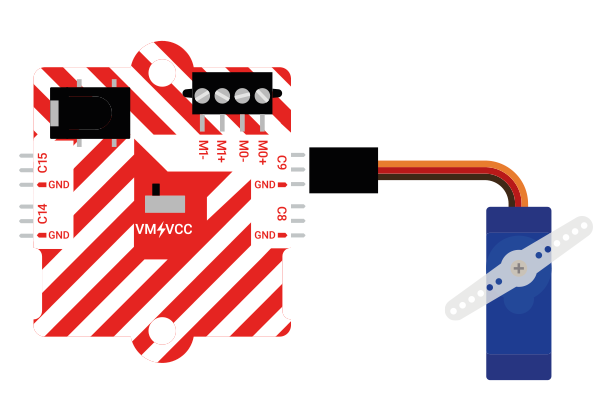
Verbinde den Servomotor mit dem Calliope mini Servoboard.
Achte auf die richtige Ausrichtung der Kabel. Die Pfeile des Servoboards zeigen auf den GND-Pin (dunkles Kabel).
Servo-Erweiterung:
Codeblock:

Los geht's!
Kontrolliere den Roboter mit den Tasten A und B oder mit der Lautstärke.
Tasten A und B
Lautstärke
Hungriger Roboter
Ob das Essen lecker ist, findet der Roboter selbst heraus. Richtig lecker sind leitende Teilchen. Verwende den Lichtsensor und das Magnetometer.
Achtung! Lege ausschließlich isolierte Objekte direkt auf den Calliope mini. Die direkte Berührung mit nicht isolierten Objekte kann zu Kurzschlüssen führen. Leitende Objekte in die Nähe zu legen reicht für die Messung der Magnetkraft aus.
Müder Roboter
Beende den ruhigen gleichmäßigen Schlaf des Roboters mit einem lauten - AUFWACHEN!
| Kategorie | Makerspace |
| Schulstufe | SEK1 |
| Material | Calliope mini, 180° Servomotor, Jumper-Kabel, Schere, Schrauben und Muttern, 2 x Papierklammer |
| Schwerpunkte | Variablen, Sequenz, Schleifen, Verzweigungen, Ereignis, Sensoren, Motoren, Debugging |
Hier findest du Lasercut- und Druckvorlagen.
Einfach runterladen, ausdrucken und losbasteln!
 Lizenziert unter Creative Commons Namensnennung - Nicht kommerziell 4.0 International
Lizenziert unter Creative Commons Namensnennung - Nicht kommerziell 4.0 International
Calliope gGmbH in Kooperation mit Lofi Robot