Calliope mini Klassensätze sowie Arbeitshefte können über den Calliope-Online-Shop bestellt werden.
Klassensatz Grundschule
Klassensatz Sekundarstufe I
Klassensatz Makerspace
Calliope mini Startbox
Für Schulen und Bildungsinstitutionen gibt es die Möglichkeit alle Artikel auch auf Rechnung zu bestellen
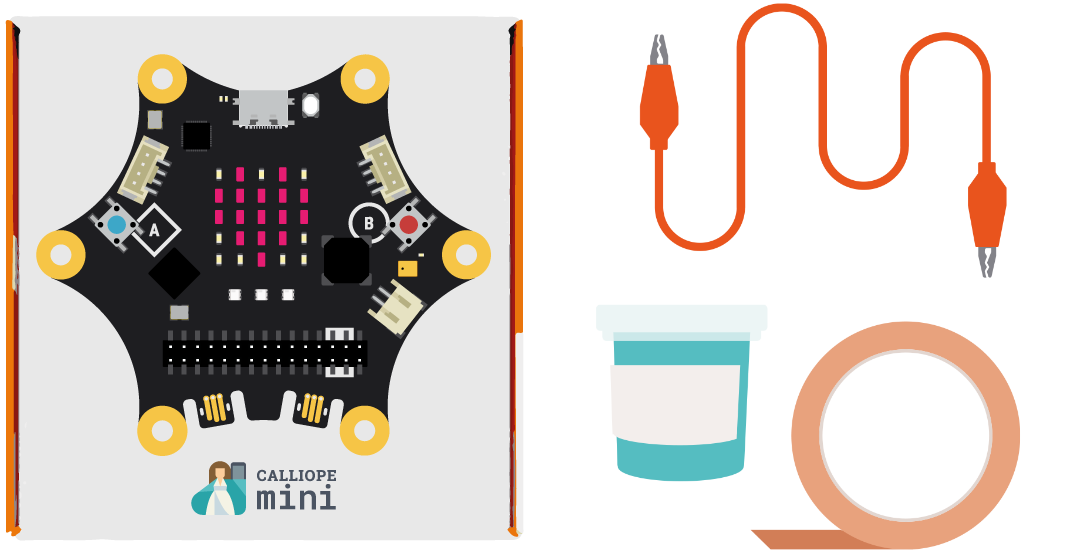
Dem Calliope mini Klassensatz für Grundschulen liegen Krokoklemmen, Kupferklebeband und LEDs bei. Für den Einsatz in der Grundschule haben wir ein paar Tipps, Materialien und Informationen zusammengestellt.
• 20 Calliope mini Startboxen
• 40 Krokoklemmen
• Kupferklebeband
• Leitende Knete
• Calliope mini Poster (DinA2)
• Calliope mini Arbeitsheft

Über das Anfrageformular erhalten Schulen und Bildungsinstitutionen auf Wunsch ein Angebot. Produktblatt
Der Klassensatz für den Einsatz ab der SEK I nutzt die Möglichkeit, den Calliope mini einfach und schnell (dank der integrierten Grove-Adapter) mit externen Sensoren und Aktoren zu erweitern. Für den Einsatz in der Sekundarstufe haben wir haben ein paar Tipps, Materialien und Informationen zusammengestellt.
• 20 Calliope mini Startboxen
• 10 Feuchtigkeitssensoren
• 10 Ultraschall Entfernungssensoren
• Calliope mini Poster (DinA2)
• Calliope mini Arbeitsheft

Über das Anfrageformular erhalten Schulen und Bildungsinstitutionen auf Wunsch ein Angebot. Produktblatt
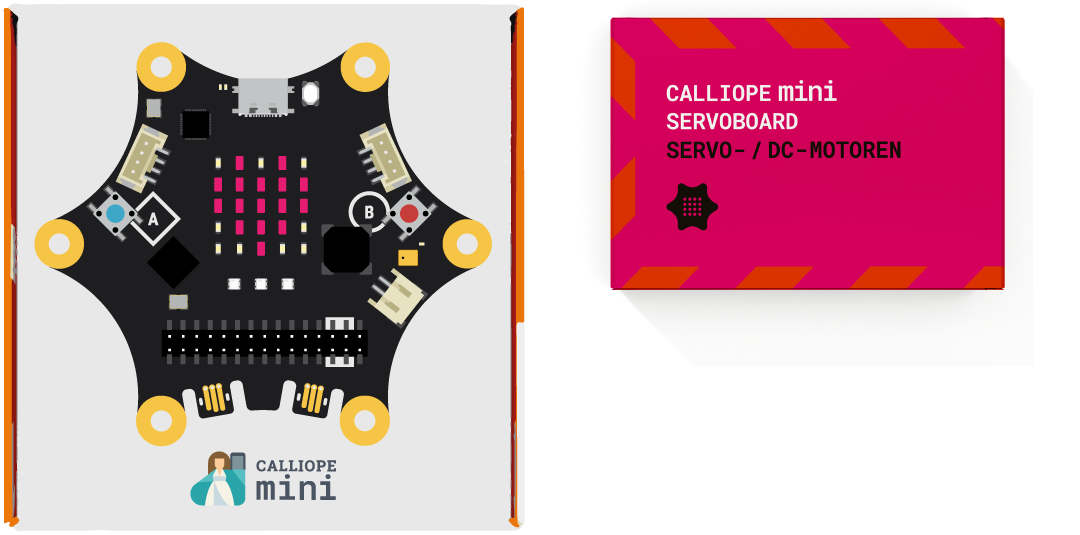
Der Klassensatz Makespace bringt alles mit was gebraucht wird, wenn Bewegung ins Spiel kommt - für kleine Maschinen und Automaten. Das Calliope mini Servoboard ermöglicht das Ansteuern von bis zu 4 Servomotoren und 2 Motoren.
Das Calliope mini Servoboard lässt sich ganz einfach über die Pinleiste des Calliope mini 3 anstecken.
Eine ausführliche Anleitung, wie das ganze funktioniert, gibt es hier.
• 10 Calliope mini Startboxen
• 10 Servoboard Box
• Calliope mini Poster (DinA2)
• Calliope mini Arbeitsheft 2
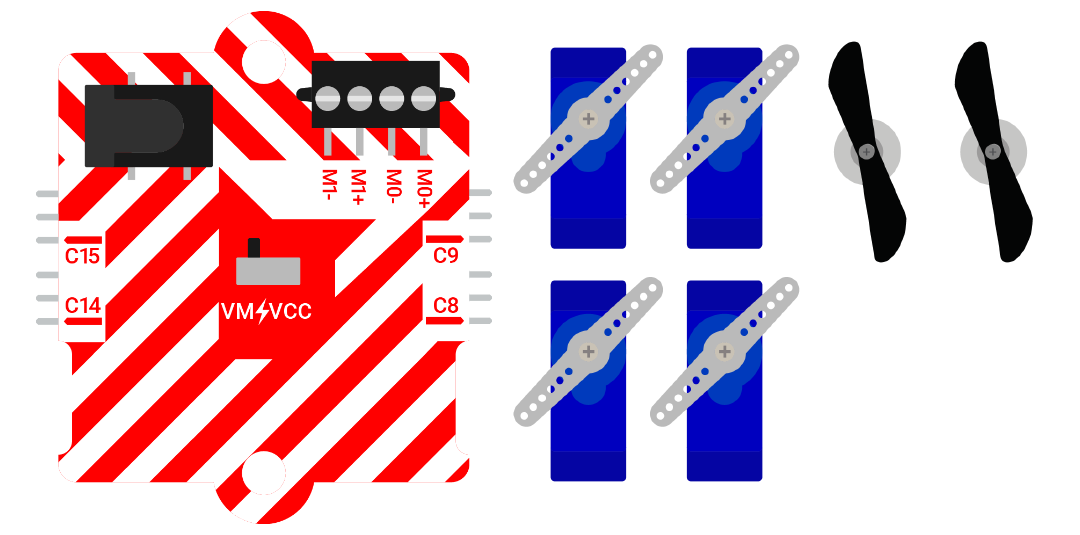
• Calliope mini ServoBoard
• 2 x 360° Servomotor (R)
• 2 x 180° Servomotor (B)
• 2 x Ventilator
• 2 x Rote Propellor
• 2 x Kleine schwarze Abstandshalter
• Batteriefach (4xAAA)
• Gebrauchsanleitung / Sicherheitsdatenblatt
Über das Anfrageformular erhalten Schulen und Bildungsinstitutionen auf Wunsch ein Angebot. Produktblatt
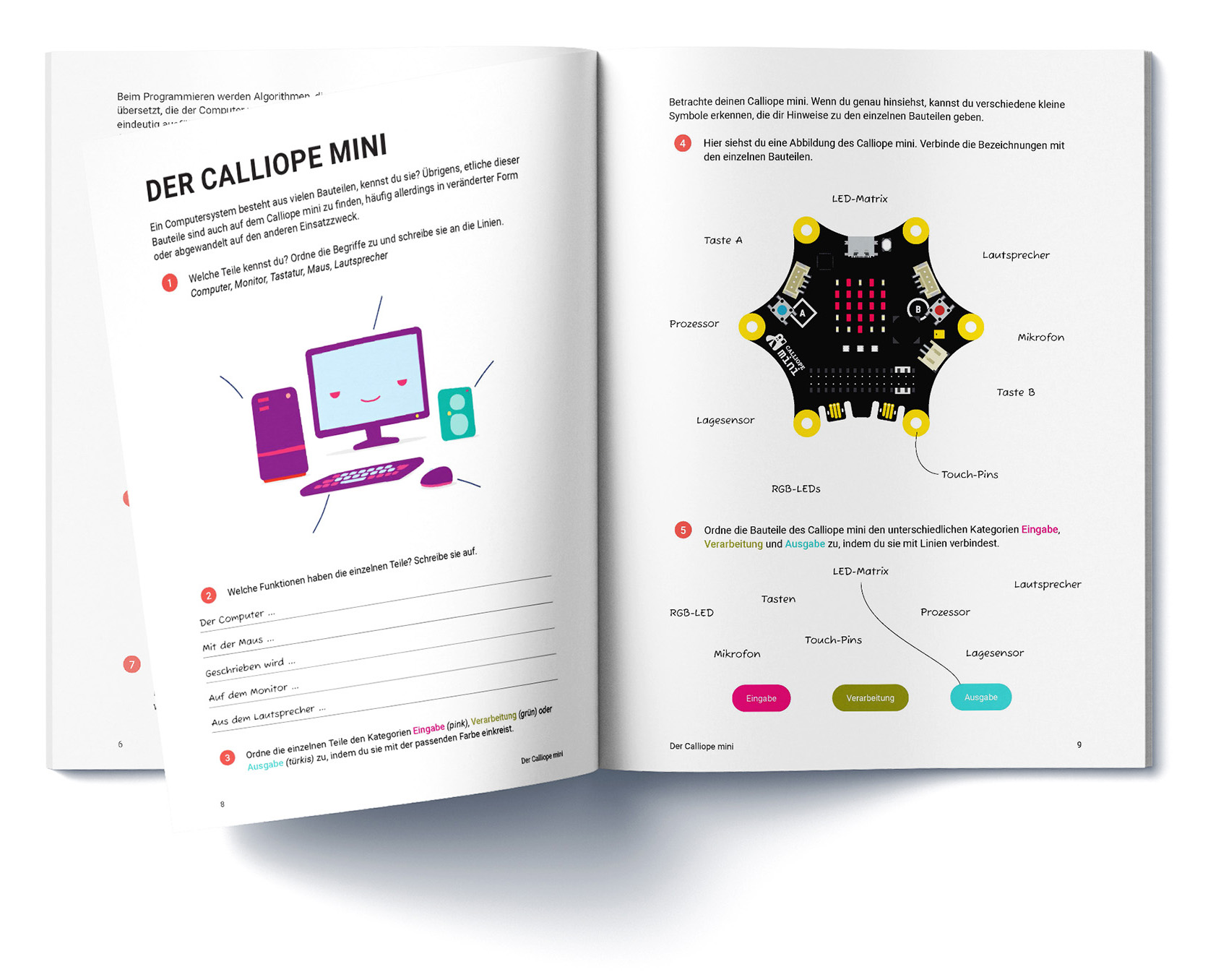
Die Druckversion des Calliope mini Arbeitshefts ist im 10er-Paket erhältlich. Das Arbeitsheft bietet eine allgemeine Einführung sowie Aufgaben zum Kennenlernen und Steuern der einzelnen Komponenten. Zahlreiche Übungen und Projekte ermöglichen einen Schritt für Schritt Einstieg in die Programmierung.
Das dazugehörige digitale Handbuch für Lehrkräfte enthält alle Lösungen, Zusatzmaterial und Tipps für die Vorbereitung und den Einsatz im Unterricht.
10 x Calliope mini Arbeitsheft
Das Arbeitsheft und Zusatzmaterial für Lehrkräfte stehen als Download zur Verfügung.
NEU!
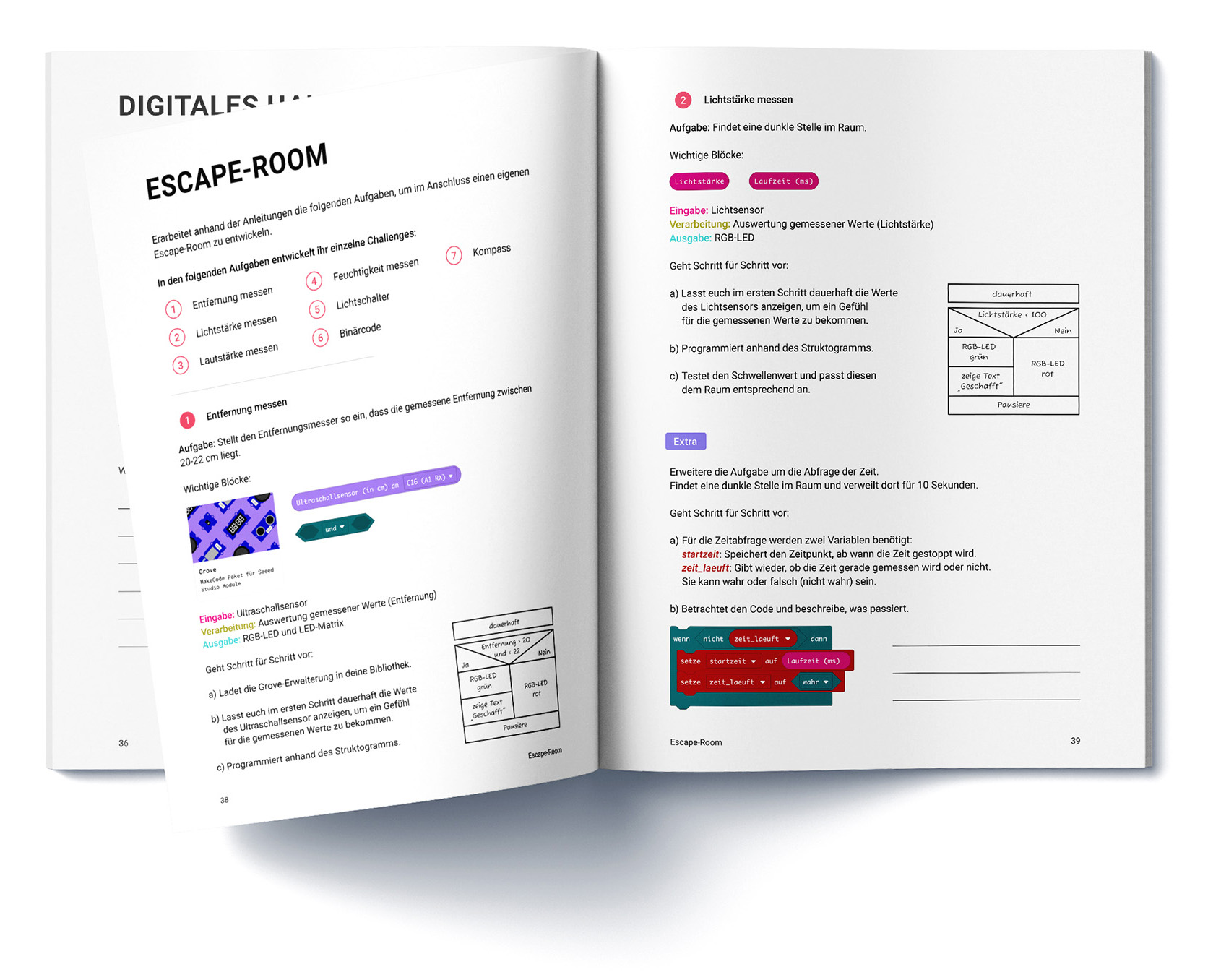
Die Druckversion des Calliope mini Arbeitshefts 2 ist im 10er-Paket erhältlich. Die Grundlagen sind gemeistert – jetzt wird es richtig spannend! Im Calliope mini Arbeitsheft 2 dreht sich alles um Spiele und Bewegung.
Schritt für Schritt werden Spielmechanismen kennengelernt, Motoren sowie Erweiterungen angeschlossen und eigene Ideen weiterentwickelt.
10 x Calliope mini Arbeitsheft
Das Arbeitsheft und Zusatzmaterial für Lehrkräfte stehen als Download zur Verfügung.
Die Calliope mini Startbox enthält, neben dem Calliope mini, einen Batteriehalter, 2 AAA Batterien, ein USB Kabel, ein Gummiband und eine Schnellstart-Anleitung.
Die Schnellstart-Anleitung gibt eine kurze Übersicht darüber, wie man den Calliope mini in Betrieb nimmt und wie die einzelnen, vorinstallierten Programme aufgerufen werden.
Die Seite mit weiteren Informationen zu diesen Programmen findet sich hier.
• Calliope mini
• Batteriehalter
• 2 AAA Batterien
• USB Kabel
• Gummiband
• Schnellstart-Anleitung

Über das Anfrageformular erhalten Schulen und Bildungsinstitutionen auf Wunsch ein Angebot. Produktblatt