| Anschluss: |
Grove: A1 (C16, C17) Pinleiste: P0, P1, P2, P3, C8, C9, C13, C14, C15 |
| Schnittstelle: | digital |
| Ausgabewerte: |
2 - 350cm |
| Weitere Informationen: | https://webshop.calliope.cc/Calliope-Ultraschallsensor |
| Bestelllink: | https://webshop.calliope.cc/Calliope-Ultraschallsensor |
Der Ultraschallsensor kann unter anderem für die Entwicklung eines autonomen Fahrzeugs genutzt werden. Im Calliope-Büro in Berlin wird ein solcher Sensor genutzt, um Besucher willkommen zu heißen: Der Sensor überwacht die Tür und sobald sich jemand durch den Eingang bewegt, steuert der Calliope mini ein kleines Glückwunschkartenmodul, das dann eine Begrüßung abspielt.
Anschluss an den Calliope mini
Der Grove Ultraschallsensor nutzt nur einen digitalen Pin für die Sendung der Schallimpulses und der Messung und berechnet aus dem zeitlichen Differenz die Entfernung. Deshalb kann jeder digitale Pin verwendet werden, um den Ultraschallsensor zu verwenden.
Im Falle der Grove-Anschlüsse kann A1 (C16) verwendet werden.
Makecode
Am einfachsten lässt sich der Ultraschallsensor mit der Grove Erweiterung nutzen. Dieses wird über Erweiterungen im Menü hinzugefügt. Nachdem du das Paket hinzugefügt hast, steht in der Kategorie „Grove“ der Block „Ultraschallsensor (in cm) an C16“ zur Verfügung.
Python
Paket hinzufügen
Im Pythoneditor musst du zuerst das Modul "Ultraschallsensor" in dein Projekt importieren. Lade dazu die folgende Datei herunter:
Ultraschallsensor vertical_align_bottom
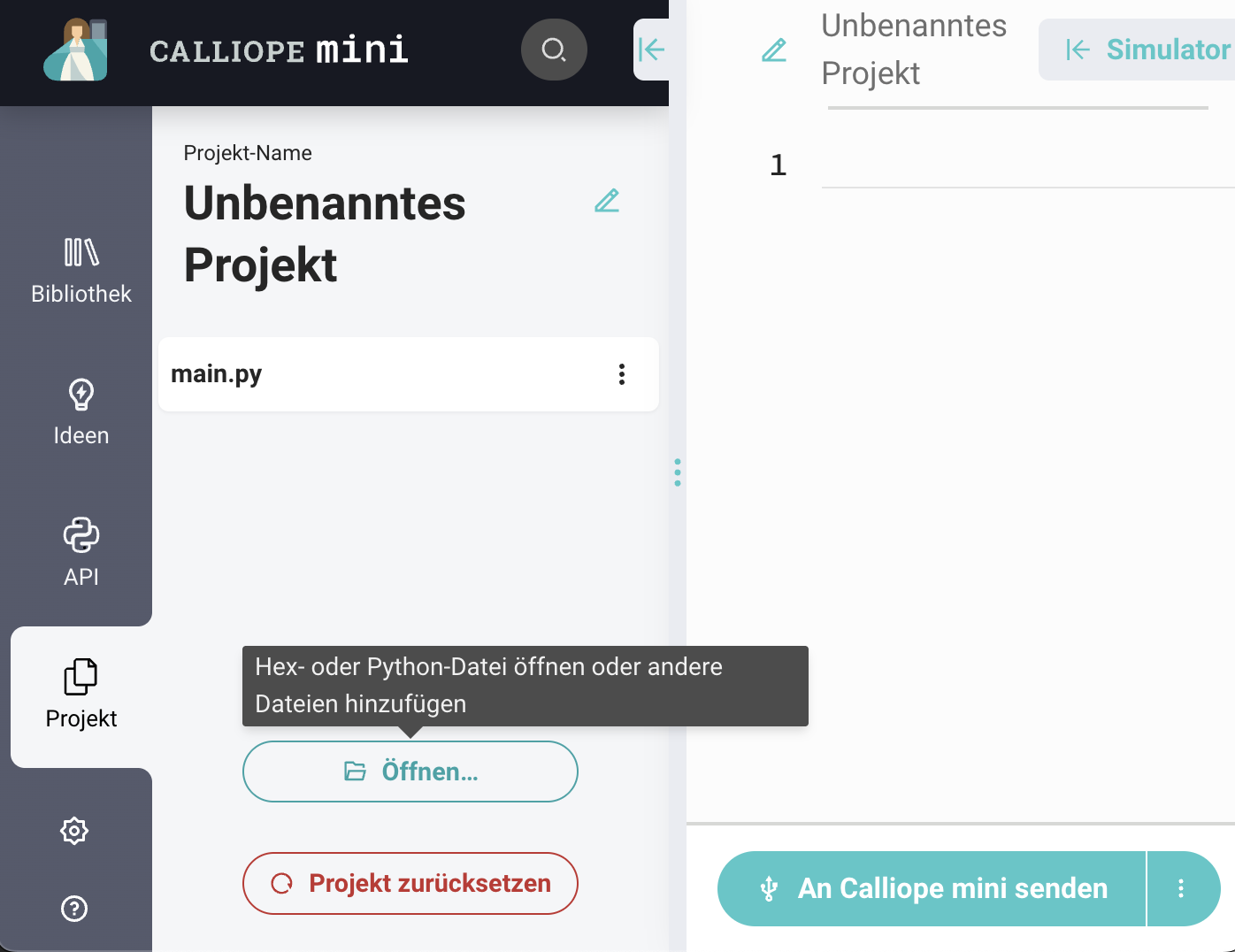
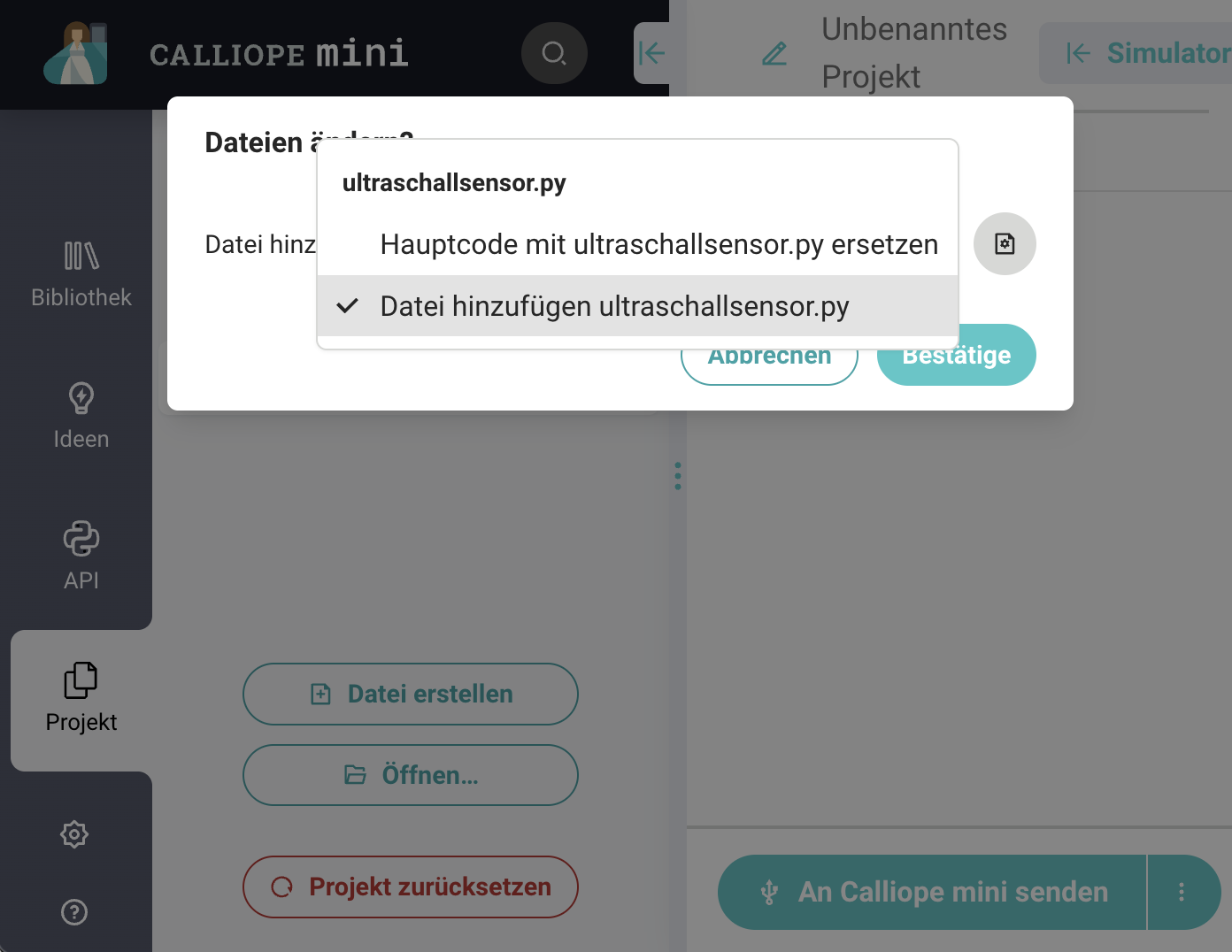
In dem Pythoneditor klicke auf den Reiter "Projekte" und anschließend auf "Öffnen..." um eine Datei in dein Projekt zu laden. Wähle die Datei ultraschallsensor.py aus und füge sie zu deinem Projekt als weitere Datei hinzu, indem du in dem Dialog "Datei ändern" das kleine Icon klickst und "Datei hinzufügen" auswählst.
Nun ist das Modul hinzugefügt und die kannst über from Ultraschallsensor import *
mit den beiden Funktionen measure_in_cm in Zentimeter und measure_in_inch in Zoll die Entfernung messen.
Ultraschallsensor programmieren
Die Werte des Ultraschallsensors können über den digitalen Pin, an dem der Ultraschallsensor angeschlossen ist in der Variable sensor_pin gespeichert werden. Im Beispiel ist der Ultraschallsensor am Grove Pin A1 (C16/RX) angeschlossen. Über die Funktion measure_in_cm() kann die Entfernung in Zentimeter ausgegeben werden. Anschließend können die Werte auf der LED-Matrix des Calliope mini angezeigt werden:
from calliopemini import *
from Ultraschallsensor import *
import time
sensor_pin = pin_A1_RX # Trigger und Echo am selben Pin (Grove-typisch)
while True:
abstand = measure_in_cm(sensor_pin)
display.show(abstand)
print("Entfernung: {} cm".format(abstand))
time.sleep_ms(100)Projekte die bereits mit dem Sensor/Aktor umgesetzt wurden, findest du hier:

