| Anschluss: |
Grove: A1 (C16, C17) |
| Schnittstelle: | analog |
| Ausgabewerte: |
XY: ca. 200 - 800 |
| Weitere Informationen: | https://wiki.seeedstudio.com/Grove-Thumb_Joystick/ |
| Bestelllink: | https://www.exp-tech.de/module/seeed-grove-system/4276/seeed-studio-grove-thumb-joystick |
Der Joystick ähnelt dem eines Controllers einer Spielkonsole. Jeder Knopf kann in jede Himmelsrichtung bewegt werden. Indem der Joystick nach unten gedrückt wird, kann eine zusätzliche Taste genutzt werden. So können Fahrzeuge und Roboter gesteuert oder auch eigene Spiele gespielt werden.
Es werden zwei Signale über die Pins C16 und C17 empfangen. C16 gibt die Werte der X-Achse und C17 die Werte der Y-Achse wieder.
Achtung, beim Calliope mini 3 muss ein anderer Pin als C17 genommen werden, da dieser nicht analoge Signale schreiben kann.
Anschluss an den Calliope mini
Hinweis: Dieser Sensor funktioniert nicht mehr an dem Grove A1 für den Calliope mini V3, da über den Pin C17 nicht mehr analog gelesen werden kann.
Der Pin müsste mit einem Kabel an einen anderen Pin umgeleitet werden und entsprechend in Makecode angepasst werden. Weitere Informationen zu den Calliope Pins finden sich in den Calliope Docs docs.calliope.cc/tech/hardware/pins
Makecode
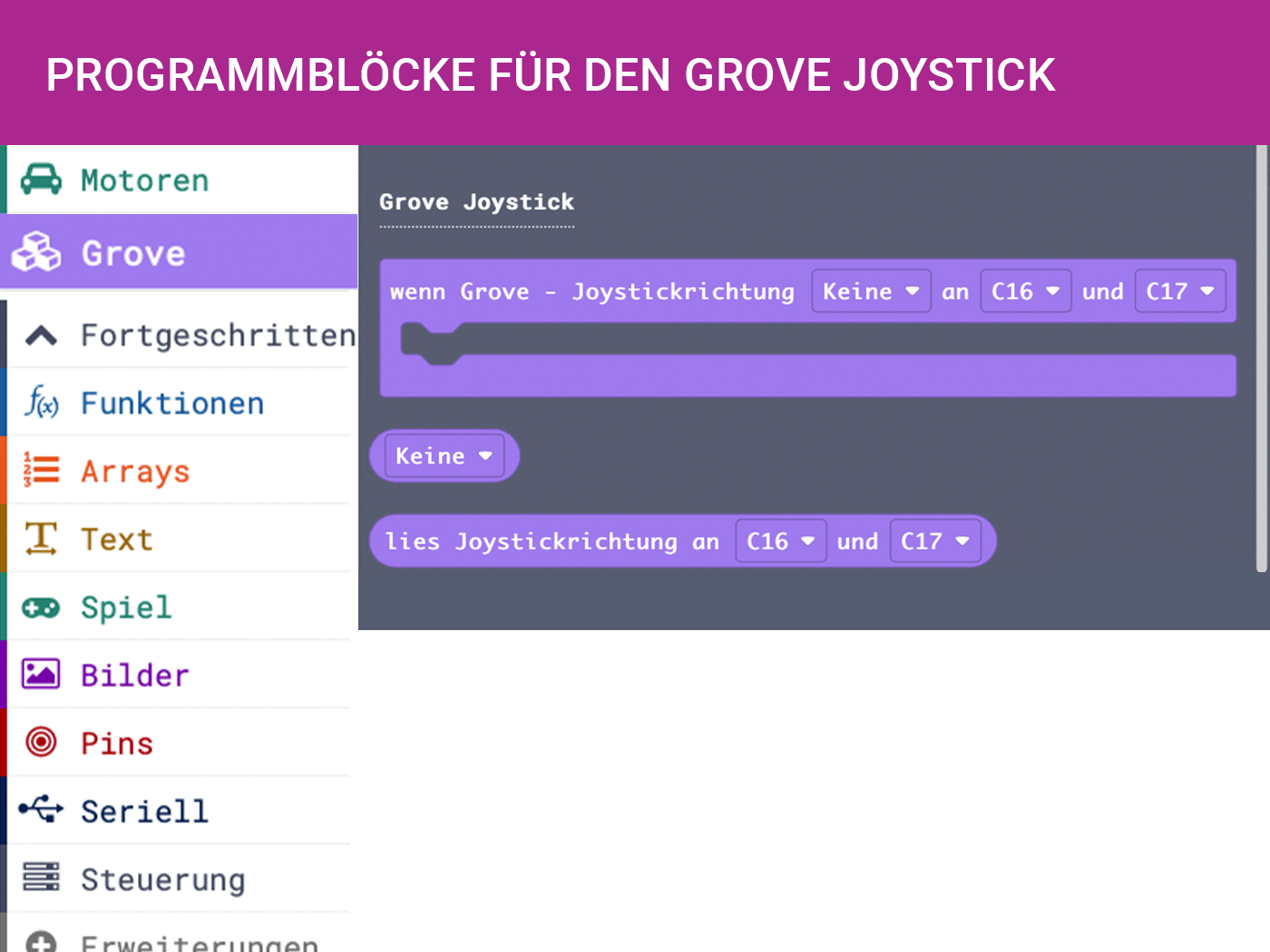
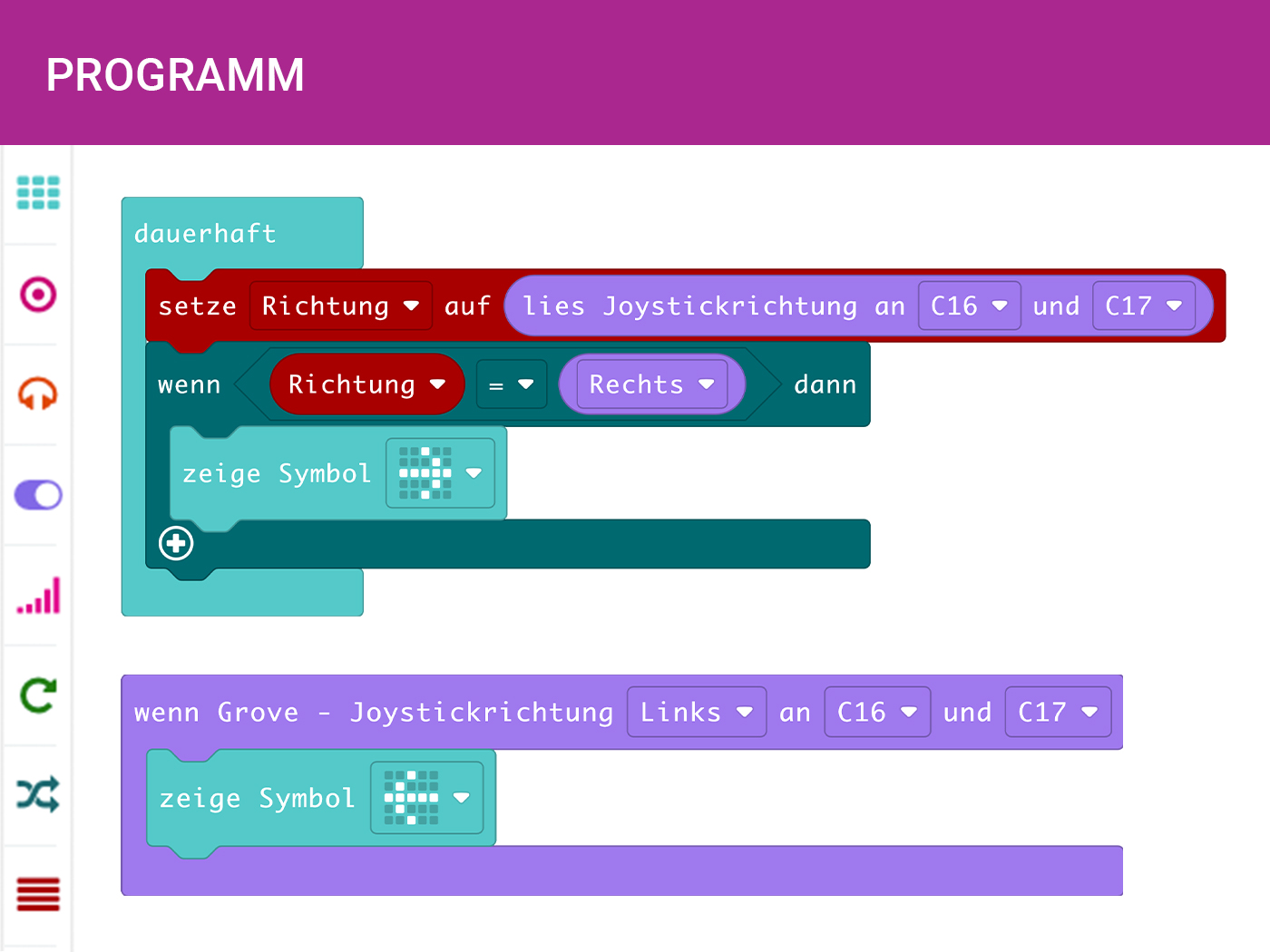
Die "Joystick"-Blöcke sind im Grove Paket enthalten. Auch hier gibt es zwei Möglichkeiten, die Werte des Joysticks auszulesen.
Entweder wird eine Dauerschleife verwendet und die Joystickrichtungen ausgelesen und in einer wenn/dann-Bedingung verglichen oder es wird der Eventbaustein "wenn Grove - Joystickrichtung x" genutzt.