| conexión: |
Grove: A1 (C16, C17) |
| interfaz: | analog |
| valores de salida |
XY: ca. 200 - 800 |
| Más información: | https://wiki.seeedstudio.com/Grove-Thumb_Joystick/ |
| se puede pedir: | https://www.exp-tech.de/module/seeed-grove-system/4276/seeed-studio-grove-thumb-joystick |
El joystick es similar al controlador de la consola de juegos. Cada botón puede ser movido en cualquier dirección. Presionando el joystick hacia abajo, se puede usar un botón adicional. Esto te permite controlar vehículos y robots o jugar tus propios juegos.
Se reciben dos señales a través de los pines C16 y C17. C16 representa los valores del eje X y C17 los valores del eje Y.
Conexión al Calliope mini:
Hinweis: Dieser Sensor funktioniert nicht mehr an dem Grove A1 für den Calliope mini V3, da über den Pin C17 nicht mehr analog gelesen werden kann.
Der Pin müsste mit einem Kabel an einen anderen Pin umgeleitet werden und entsprechend in Makecode angepasst werden. Weitere Informationen zu den Calliope Pins finden sich in den Calliope Docs docs.calliope.cc/tech/hardware/pins
Makecode
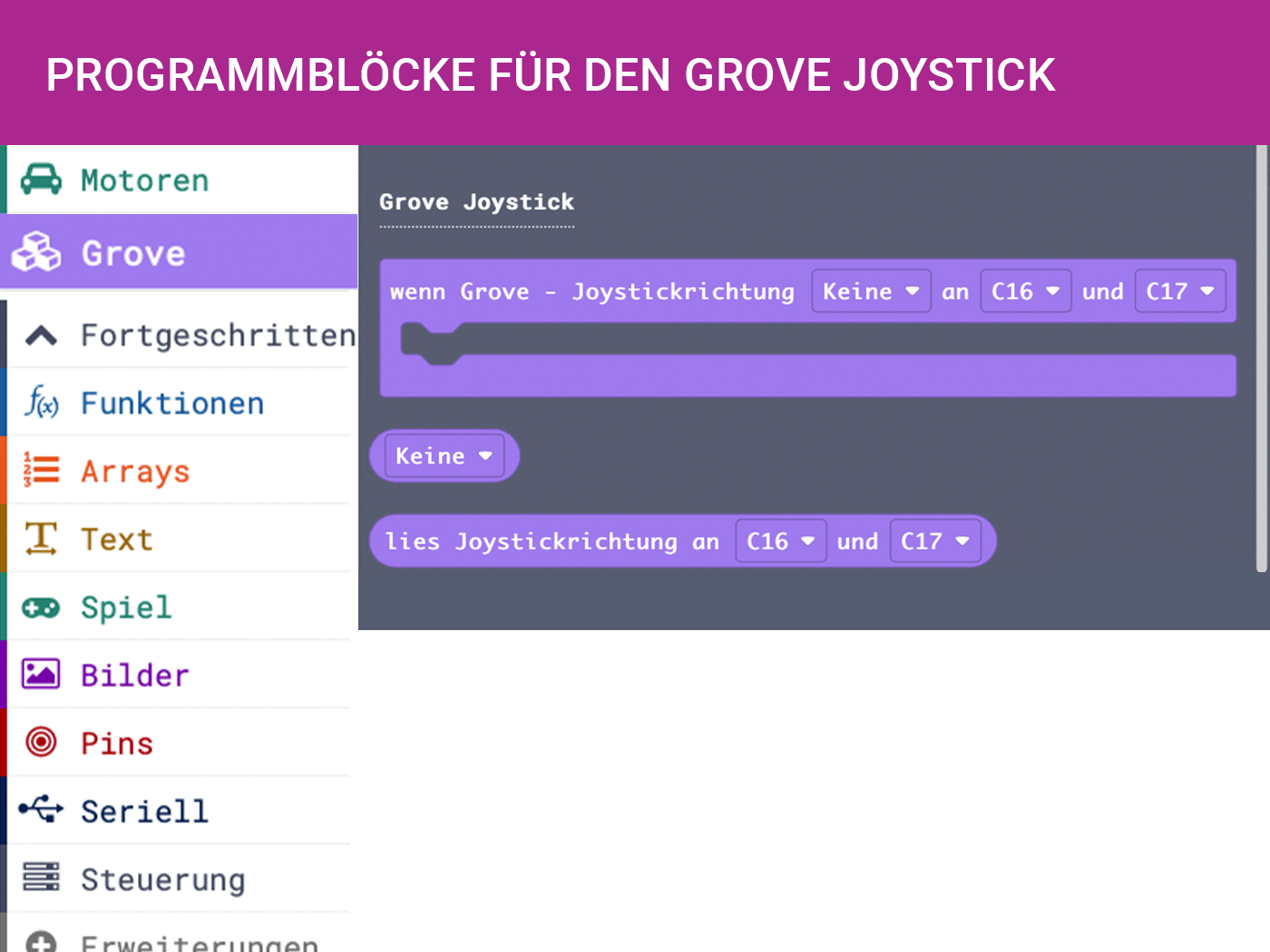
Los bloques de "joystick" están incluidos en el paquete de Grove. De nuevo, hay dos maneras de leer los valores del joystick.
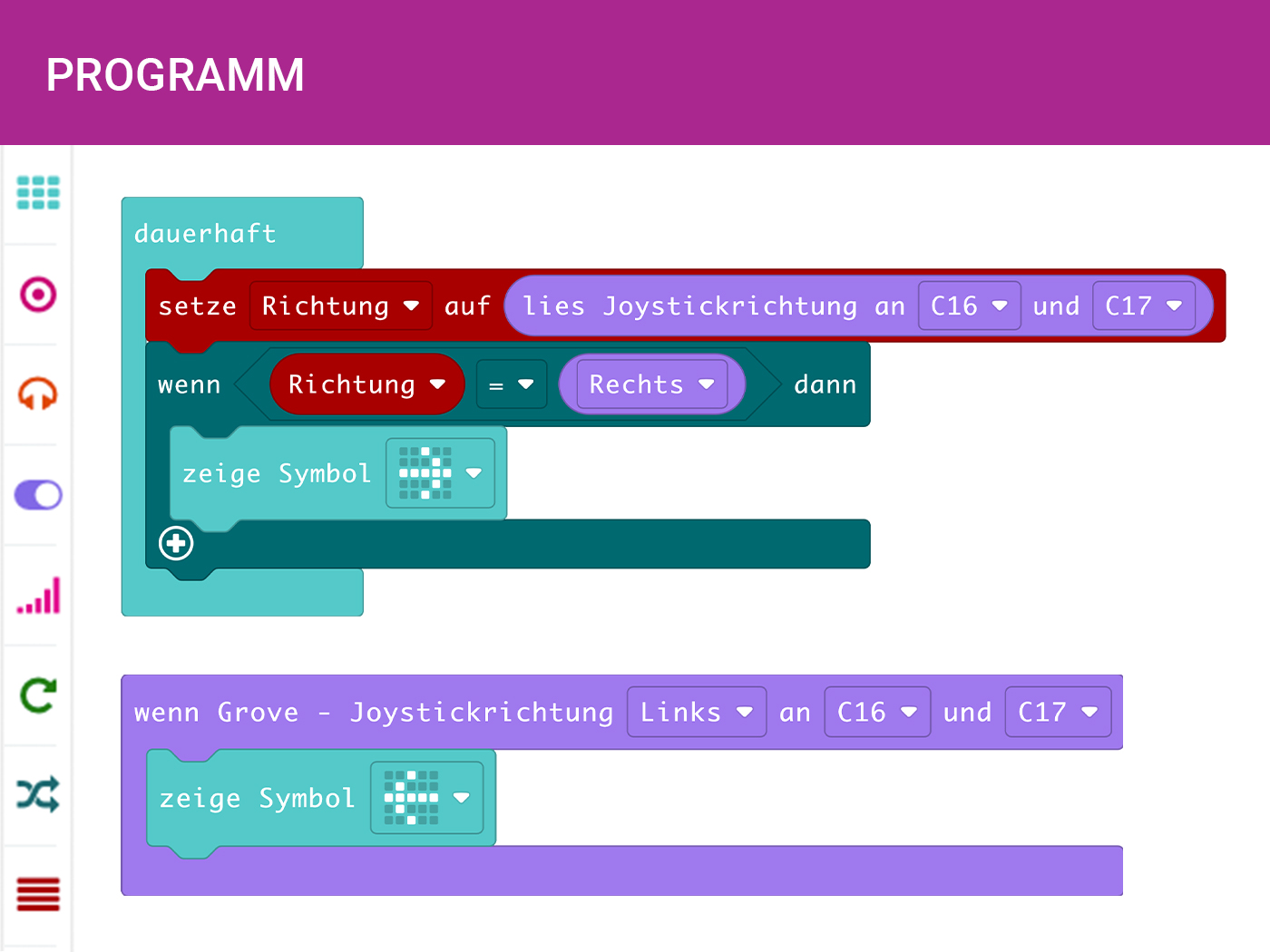
Se utiliza un bucle continuo y se leen y comparan las direcciones de los joysticks en una condición if-then o se utiliza el bloque de eventos "if Grove - dirección del joystick x".