Erste Schritte: Gruseliger Kürbis
Mit Hilfe des Calliope mini kannst du deinen Kürbis zum Leben erwecken und ihm bewegliche Augen zaubern. Wie das geht, erfährst du hier.
Zubehör für einen Kürbis mit drei Augen: 3x Tischtennisbälle, Draht, Dübel, 3x PVC-Rohre (4 cm x 3 cm), Fineliner, 3x Calliope minis, 3x MotionKit Servo Boards, USB-Kabel, 3x4 AA-Batterien, 3x Batteriehalter für 4 Batterien, 3x Grove-Kabel, 3x Plastiktüten, große Schale
Werkzeug: Heißklebepistole, scharfes Messer, Löffel

Der erste Schritt liegt im Basteln der beweglichen Augen. Dafür müssen entweder die weißen Tischtennisbälle mit Augen bemalt werden, oder es werden direkt kleine Augenbälle aus dem Bastelladen gekauft. Auf den Seiten des Auges muss jeweils ein Loch gebohrt werden. Achte darauf, dass sich die Löcher gegenüber liegen, sodass im Nachhinein ein Draht hindurch geschoben werden kann. Der Draht sollte lang genug sein, sodass die Enden auf beiden Seiten des Tischtennisballs mindestens 3 cm überragen.
Tipp: Benutze einen Draht, der nicht allzu weich ist, sodass er sich nicht zu stark verbiegt.
Dann werden die Rohre und die Dübel vorbereitet. Diese sollten so geschnitten werden, dass die Rohre eine Breite von 4 cm und die Dübel eine Länge von 4 cm haben. Der Augapfel wird dann auf den Rohren befestigt, indem die Enden des Drahtes auf dem Rohr mit Heißkleber festgeklebt werden.

Nachdem die Augäpfel auf den Rohren befestigt sind und dafür gesorgt wurde, dass sie sich frei drehen können, werden die Dübel vorbereitet. Dafür wird an einem Ende ein Loch durch den Dübel gebohrt, das so breit ist, dass ein Stück Draht durchpasst. Das andere Ende des Dübels wird durch die Rohre gesteckt und am hinteren Ende des Augapfels festgeklebt.
Das eine Ende des Stück Drahtes wird durch das Loch im Dübel gesteckt. Das andere wird am Servomotor befestigt. Die Servomotoren werden dann mit Heißkleber an die Rohre geklebt.

Bevor du die Augen im Kürbis verbaust, solltest du testen, ob sie sich ordentlich bewegen. Dafür verbindest du die Servomotoren mit dem MotionKit Servo Board. Wir brauchen eine höhere Stromversorgung für die Inbetriebnahme der Motoren. Deswegen wird zusätzlich an jedes Board eine extra Energiequelle angeschlossen (4 AA, 6V). Für jedes Auge benötigst du also einen Servomotor, ein MotionKit Servo Board, einen Calliope mini und eine extra Energiequelle. Die minis verbindest du über Grove-Kabel mit den Boards.
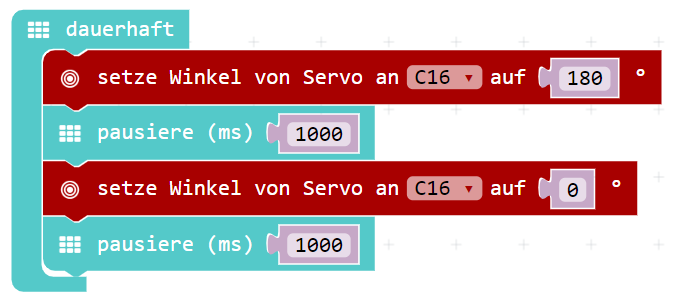
Die Servos werden über den Pin C16 auf dem MotionKit Servo Board angesteuert. Der Ansteuercode könnte z.B. so aussehen:
Bei den Werten könnt ihr etwas herumspielen.
Zum Schluss bereitest du den Kürbis vor. Dafür wird der Kürbis zuerst ausgehöhlt und so viele Löcher in den Kürbis geschnitzt, wie Augen vorbereitet wurden. Die Löcher müssen so groß sein, wie die Augäpfel breit sind.
Tipp: Bevor du die Löcher ausschneidest, bietet es sich an, die Löcher auf den Kürbis aufzuzeichnen. So sorgst Du dafür, dass die Löcher die richtige Größe haben.
Stecke die Augäpfel von innen durch die Löcher und befestige sie mit Heißkleber. Sollte das nicht halten, kannst du auch Schrauben benutzen.
Zum Schutz der Technik solltest du die minis und die Boards in einer Plastiktüte im Kürbis aufbewahren.

Aus dem übrig gebliebenen Kürbisfleisch kannst du eine leckere Kürbissuppe kochen! Wenn Du magst, verziere den Kürbis noch mit einem gruseligen Mund und schenke ihm eine Nase.
Dieses Projekt orientiert sich an der Anleitung von Markus Haack auf hackster.io. Der Code und das technische Zubehör ist auf den Calliope mini angepasst.