| Developer/Provider: | Fraunhofer IAIS |
| Type of application: | Web application |
| Operating system: | Cross platform |
| Account required: | No, optional for more features |
| Installation: | No |
| Usable offline: | Yes, an individual server can be hosted with an image of Open Roberta: Local installation |
Open Roberta is an editor developed by the Fraunhofer Institute, which can be used to program various microcontrollers and robots in the graphical programming language NEPO®. The Wiki of Open Roberta contains general information on how to use the editor and an introduction to programming the Calliope mini.
File management
Save project
The storage format for the Open Roberta projects is XML.
With an account, projects can be saved online on the server and accessed under "my programs" from different computers.
Transmit to the Calliope mini
The file format to run the program on the Calliope mini is .HEX. The hex file does not contain any information about the program structure in the editor. This means that only XML files can be exported and imported.
Share program
Programs can be shared as a link. However, this is very long, because in it all the information about the program structure has been stored. With an account it is possible to share the programs directly with other users or to upload them to the gallery, to which everyone has access (even without an account). In addition, programs of multiple students without an account can be sent to a group owner with an account in group management.
Program features
Simulation and Debugger
With the simulation and the debugger there is it is possible to test the program without having to transmit it to the Calliope mini and to check for errors.
Group management
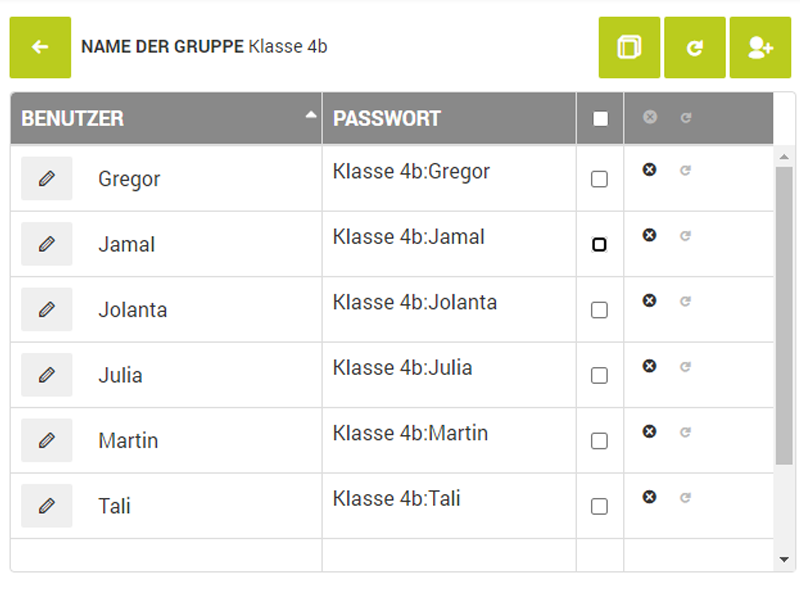
With the group management it is possible, for example, as a teacher to view the projects of the students without them having to create their own account. The teacher can also share programs for the group.
Galerie
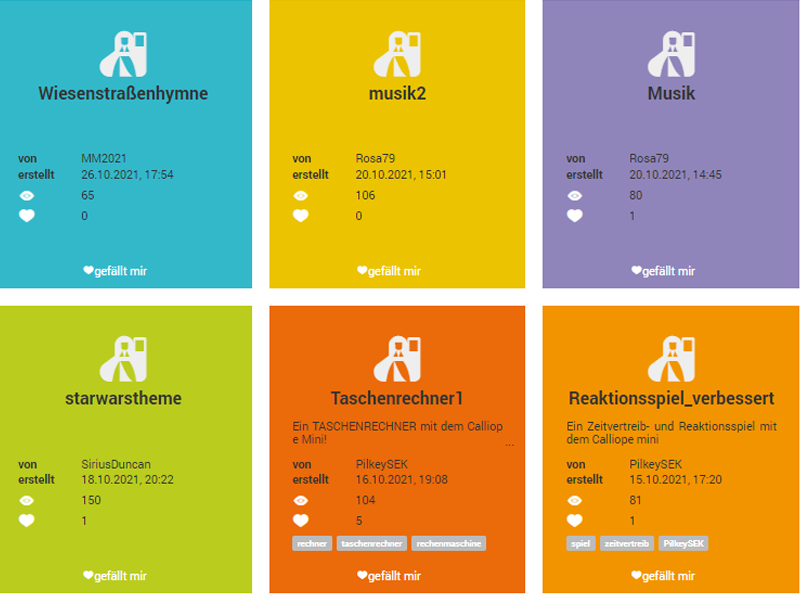
With an account it is possible to share the projects to the gallery and make them available for other users. However, no user account is required to browse through all the published projects.
Robot configuration
The robot configuration provides an overview of all internal sensors/actuators and external ones can be added and configured.
Programming concepts
| Block-based programming | Yes |
| Text-based programming | No, but the source code can be displayed in C/C++ |
| Multithreating | No |
| Events (event-based programming) | No, procedural |
| Variables | Yes |
| Lists / multidimensional lists | Yes / No |
| Loops: While / For / Foreach | Yes / Yes / Yes |
| Functions / with parameters / with return value | Yes / Yes / Yes |
| Serial communication | Yes |
| Sensors/actuators extensions | Yes, preset selection |
Documenting and commenting
Comments
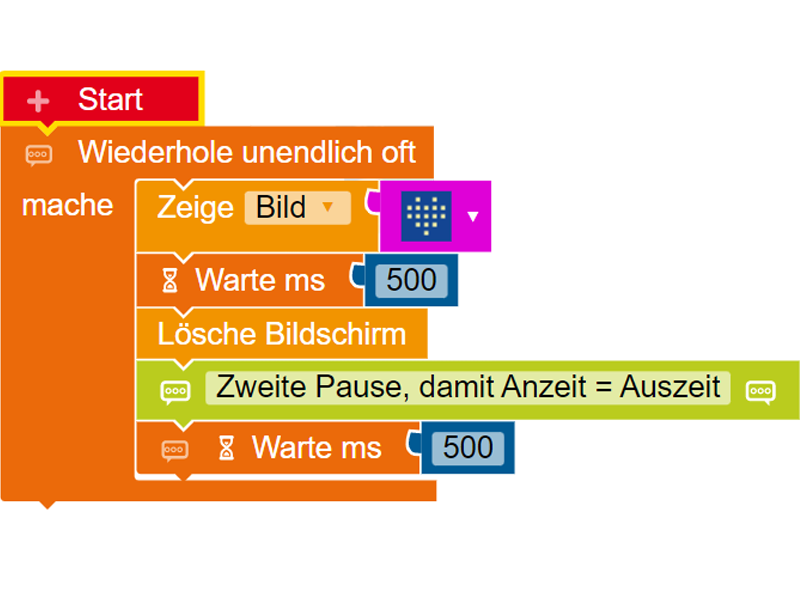
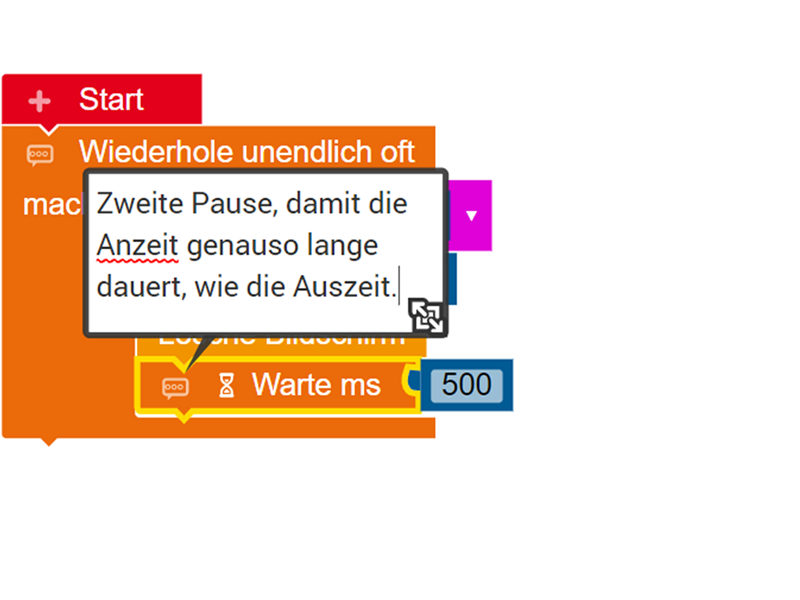
Comments can be stored directly at the blocks. In addition, there is a separate comment block, so that the comment is also displayed in the generated source code editor.
NEPO-2-Image
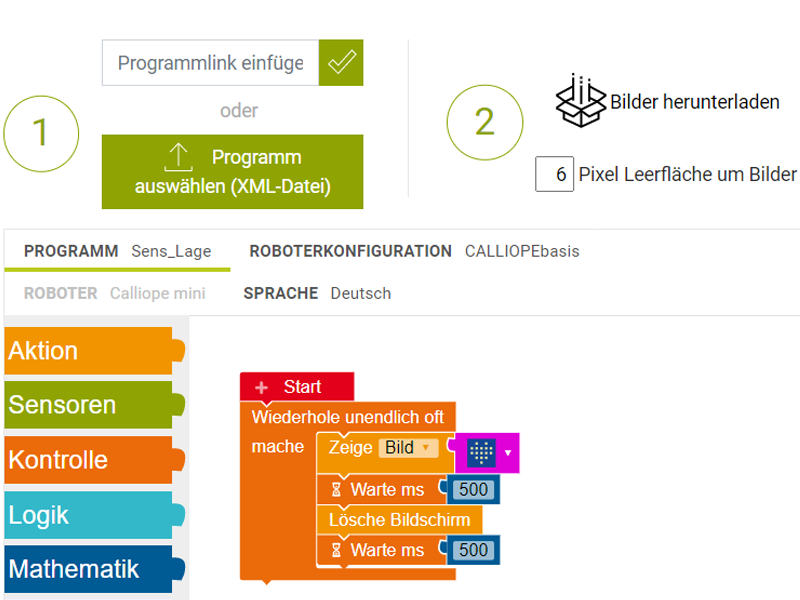
In order to create teaching material or own instructions for programs, it is helpful to take screenshots. With the NEPO-2-Image web tool, the screenshots can be created both as vector graphics (svg) and as high-resolution pixel graphics (png). The blocks are all displayed individually and as a whole program with a transparent background, so that they can be placed freely on the teaching material.
Documentation and help
If the question mark symbol on the right corner of the editor is clicked, a detailed documentation of the individual programming blocks opens. Alternatively, the direct information about the block can be accessed by selecting it with a right mouse click and clicking Help .