| port: |
Grove: A1 (C16, C17) |
| interface: | analog |
| output values |
X/Y approx. 200 - 800 |
| Further information: | https://wiki.seeedstudio.com/Grove-Thumb_Joystick/ |
| Order: | https://www.exp-tech.de/module/seeed-grove-system/4276/seeed-studio-grove-thumb-joystick |
The joystick is similar to a game console controller. Each button can be moved in any direction. By pressing the joystick down, an additional button can be used. This way vehicles and robots can be controlled or even own games can be played.
Two signals are received via pins C16 and C17. C16 represents the values of the X-axis and C17 the values of the Y-axis.
Connection to the Calliope mini:
Hinweis: Dieser Sensor funktioniert nicht mehr an dem Grove A1 für den Calliope mini V3, da über den Pin C17 nicht mehr analog gelesen werden kann.
Der Pin müsste mit einem Kabel an einen anderen Pin umgeleitet werden und entsprechend in Makecode angepasst werden. Weitere Informationen zu den Calliope Pins finden sich in den Calliope Docs docs.calliope.cc/tech/hardware/pins
Makecode
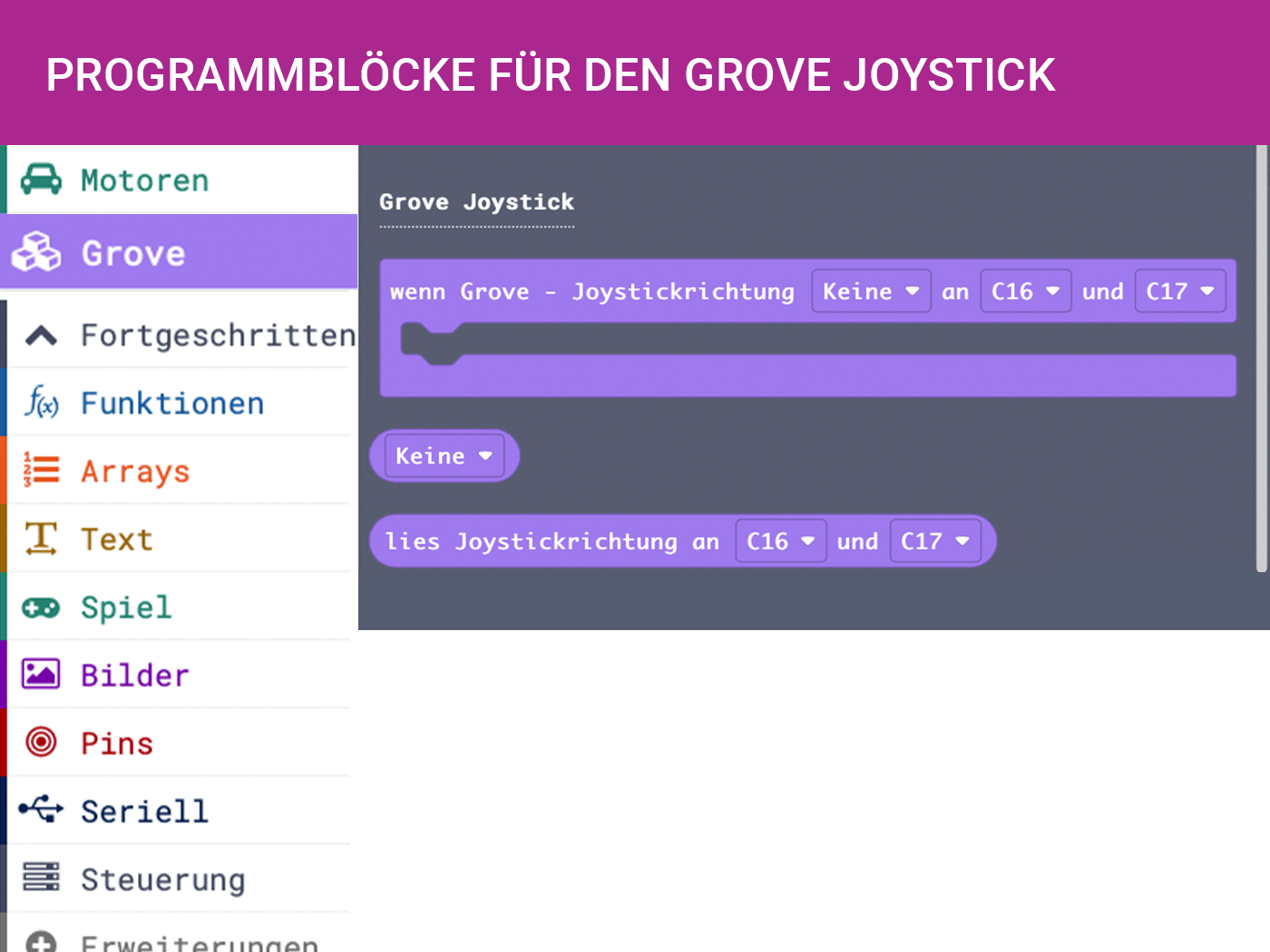
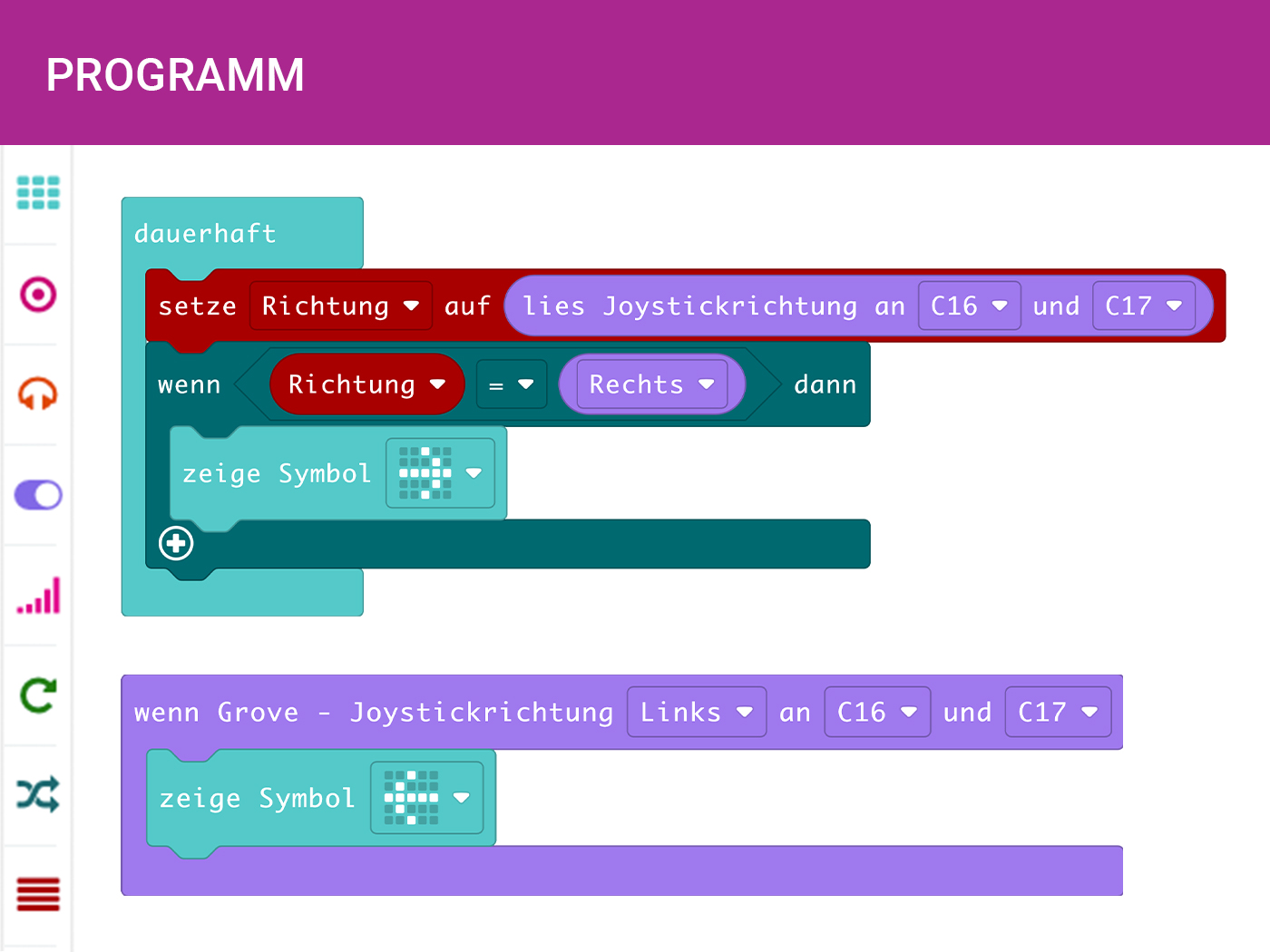
The "Joystick" blocks are included in the Grove package. Again, there are two ways to read out the values of the joystick.
Either a continuous loop is used and the joystick directions are read and compared in an if-then condition or the event block "if Grove - joystick direction x" is used.