
Das MotionKIt folgt autonom einer schwarzen Linie auf hellem Untergrund. Das MotionKit verfügt über zwei Lichtsensoren auf der Unterseite. Diese erfassen, ob sie sich auf einer hellen oder dunklen Oberfläche befindet.
Beide Sensoren senden Licht und messen das reflektierte Licht. Wird Licht reflektiert, befindet sich der jeweilige Sensor über einer hellen Fläche. Wird kein Licht reflektiert, ist die Fläche unter dem Sensor dunkel.
Der Abstand zwischen den beiden Sensoren beträgt etwa 2 cm. Die Linie sollte daher ungefähr diese Breite haben.
| Kategorie | Erweiterung |
| Schulstufe | SEK1 |
| Material | Calliope mini, MotionKit |
| Schwerpunkte | Variablen, Schleifen, Verzweigungen, Sensoren, Erweiterungen, Motoren, Debugging |
Die Logik hinter dem Linienfolger:
Erfassen beide Sensoren eine dunkle Fläche, fahren beide Motoren geradeaus.
Erfasst der linke Sensor eine dunkle Fläche und der rechte Sensor eine helle, ist das MotionKit nach rechts von der Linie abgekommen und muss leicht nach links gesteuert werden.
Erfasst der rechte Sensor eine dunkle Fläche und der linke Sensor eine helle, ist das MotionKit nach links von der Linie abgekommen und muss leicht nach rechts gesteuert werden.
Erfassen beide Sensoren eine helle Fläche, hält das MotionKit an.
Hier findest du Informationen zum MotionKit und einen Anleitung für den Aufbau.

Für die Programmierung wird die MotionKit Erweiterung benötigt.
Verwende einen Variable, um beide Motoren zusammen oder individuell zu steuern.

Über diesen Block bekommst du die gemessenen Werte der Lichtsensoren:

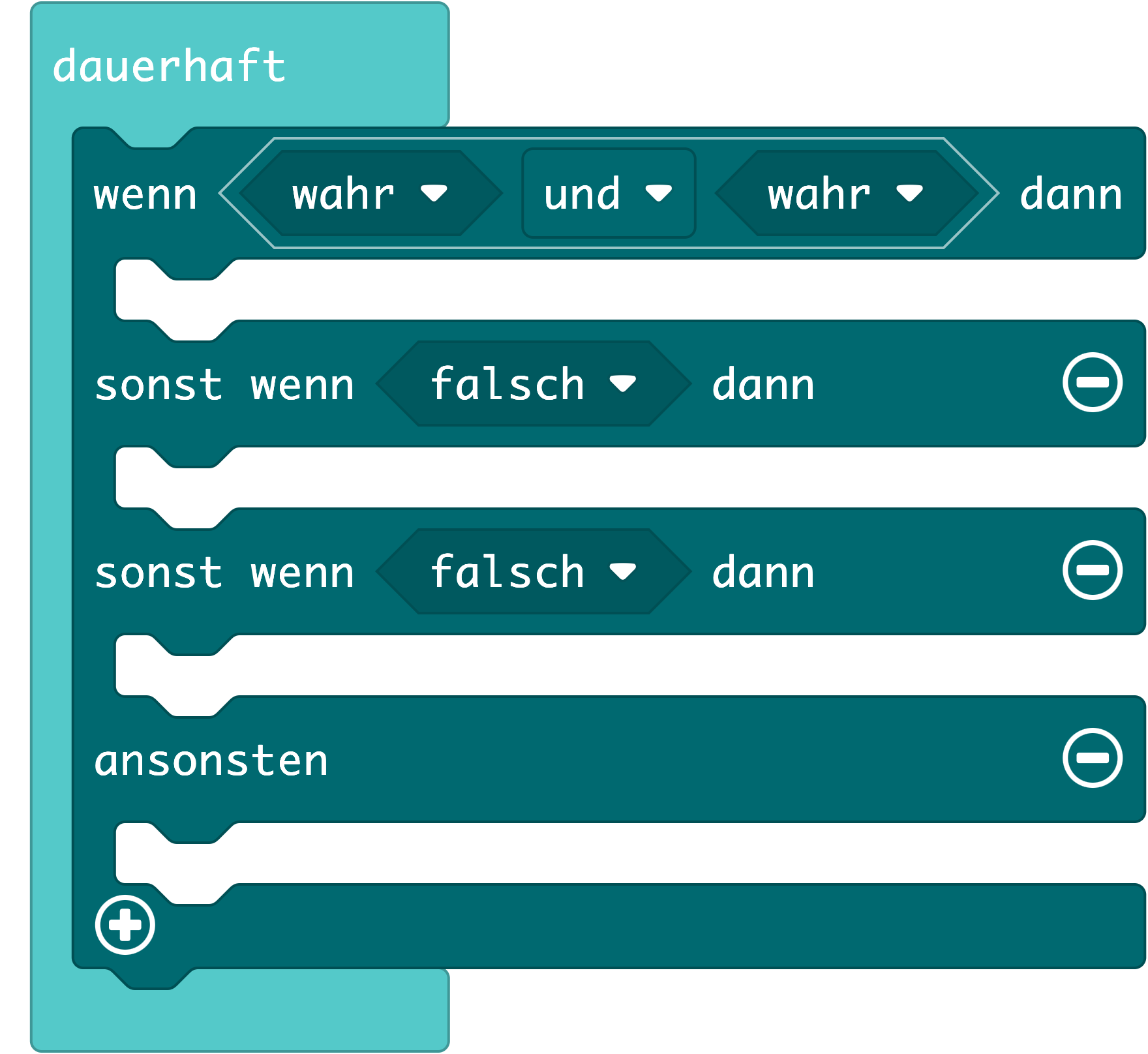
Über mehrere Verzweigungen lassen sich die unterschiedlichen Fälle abfragen:
 Lizenziert unter Creative Commons Namensnennung 4.0 International
Lizenziert unter Creative Commons Namensnennung 4.0 International
Calliope gGmbH - Idee basierend auf dem Material von: calliopemini.info