Historia
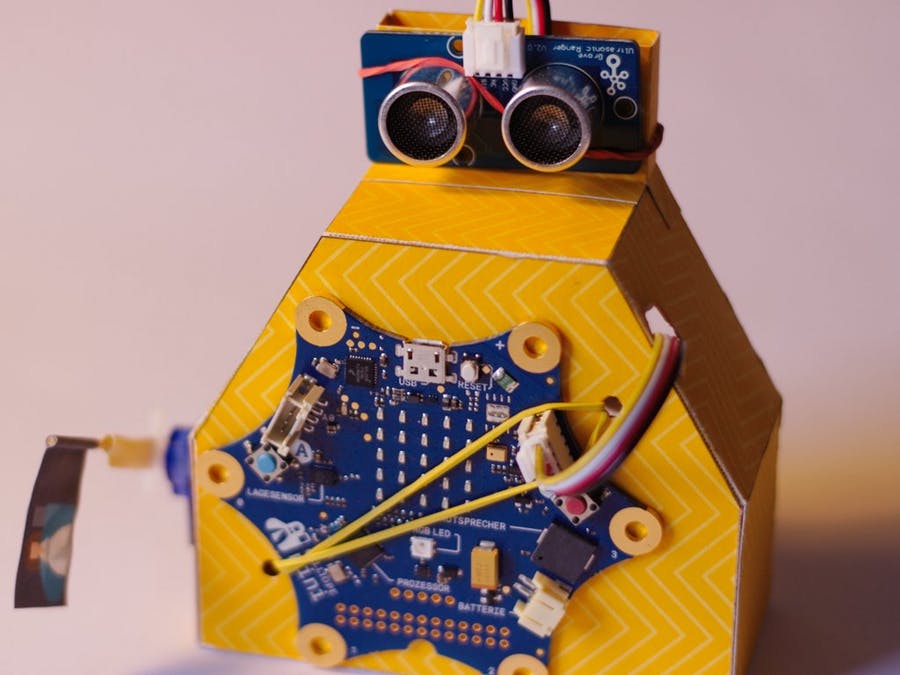
En este proyecto describiré la construcción de un robot de ondulación. Cuando te acercas al robot (más precisamente al sensor de distancia ultrasónico que se parece a sus "ojos") a una distancia fija, un servo comienza a moverse de un lado a otro: el robot ondea. Está controlado por un Calliope mini.
El robot se construye en tres fases:
1. elaboración del caso
2. equipándolo con componentes electrónicos
3. programación del Calliope Mini
Elaboración de la caja
Para el caso se necesita un cartón DinA4 (21,00 x 29,70 cm), que debe ser lo más grueso posible y al mismo tiempo lo suficientemente delgado como para ser impreso en la impresora. Utilicé un cartón de 300 g/m2, que funcionó bien. Se imprimirá con la siguiente plantilla (PDF en los apéndices):
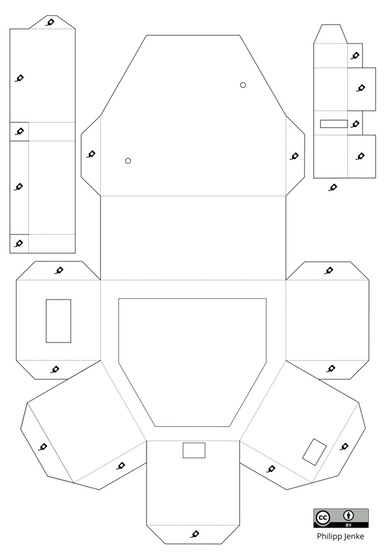
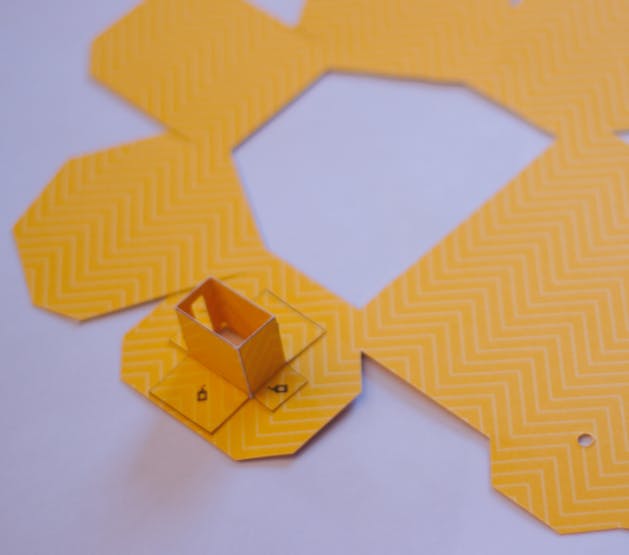
El patrón debe ser cortado a lo largo de la longitud de las líneas sólidas. Las superficies interiores pueden recortarse fácilmente con un bisturí. Si no está a mano, también se pueden utilizar tijeras.

Doble a lo largo de las líneas de puntos. Esto se puede hacer marcando el cartón con la punta de las tijeras a lo largo de las líneas con la ayuda de una regla. Los dos círculos pequeños de la caja deben ser perforados. La forma más fácil de hacerlo es con una pinza para perforar. Si no está a mano, también debe doblarse con un objeto puntiagudo. Los orificios deben ser lo suficientemente grandes para que se pueda pasar una banda elástica. Las áreas marcadas con un pequeño símbolo de botella adhesiva son las áreas adhesivas.
Atención: el montaje del servo (arriba a la derecha) está diseñado para las dimensiones exactas del servo. En mi caso se trata del "Tower Pro Micro Servo 9G, SG 90". Puede obtenerlo, por ejemplo, en eBay o Alibaba. Si utiliza otro servo con diferentes dimensiones, deberá ajustar la plantilla de corte.
Después de cortar, pegue primero las dos piezas pequeñas en un anillo.
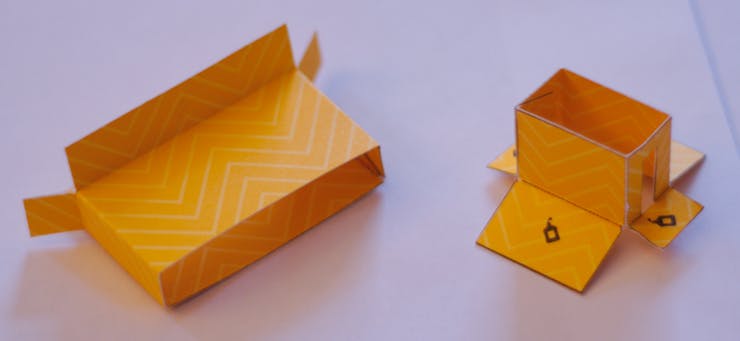
A continuación, pegue el soporte para el servo (en la parte superior derecha de la plantilla) en la carcasa. La ranura del soporte apunta hacia arriba. El servo soporte debe estar dentro más tarde.
Ahora una banda elástica es atada a través de los dos agujeros. Esto se supone que tiene que contener la Calliope mini más tarde.

En mi experiencia, la forma más fácil de hacerlo es pegar primero las lengüetas de los paneles laterales y luego las de la parte delantera. Las pinzas de la ropa son adecuadas para sujetar la conexión adhesiva.
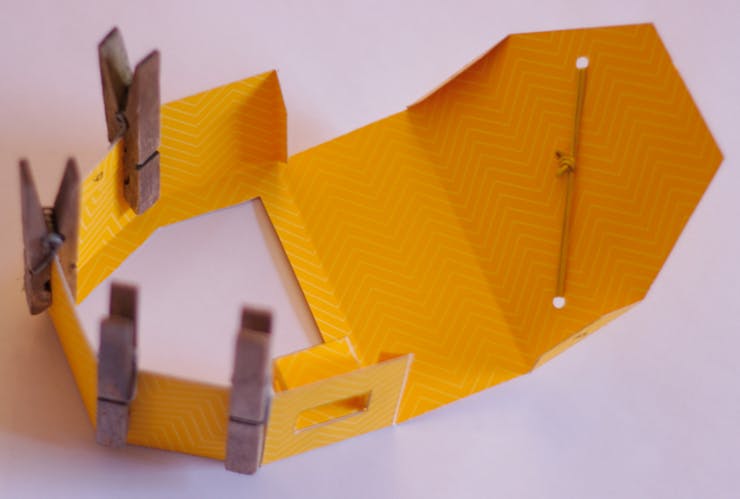
Finalmente, pegue el soporte para el sensor ultrasónico (en la plantilla de arriba a la izquierda) a ras con la parte posterior de la carcasa de arriba.
El último paso es la construcción del brazo de agitación. Para esto convertí un palillo de dientes en un asta de bandera. La bandera es un trozo de papel con un tamaño aproximado de 3 cm x 2 cm. Si lo imprimes con un motivo, tienes que poner la imagen dos veces una al lado de la otra (unos 6 cm x 2 cm) y pegarla alrededor del palillo de dientes. El palillo de dientes se pega con cinta adhesiva al adaptador, que forma parte del servo. Todo el brazo está puesto en el servo.

Equipar todo con los componentes electrónicos
Ahora es el momento de instalar la electrónica.
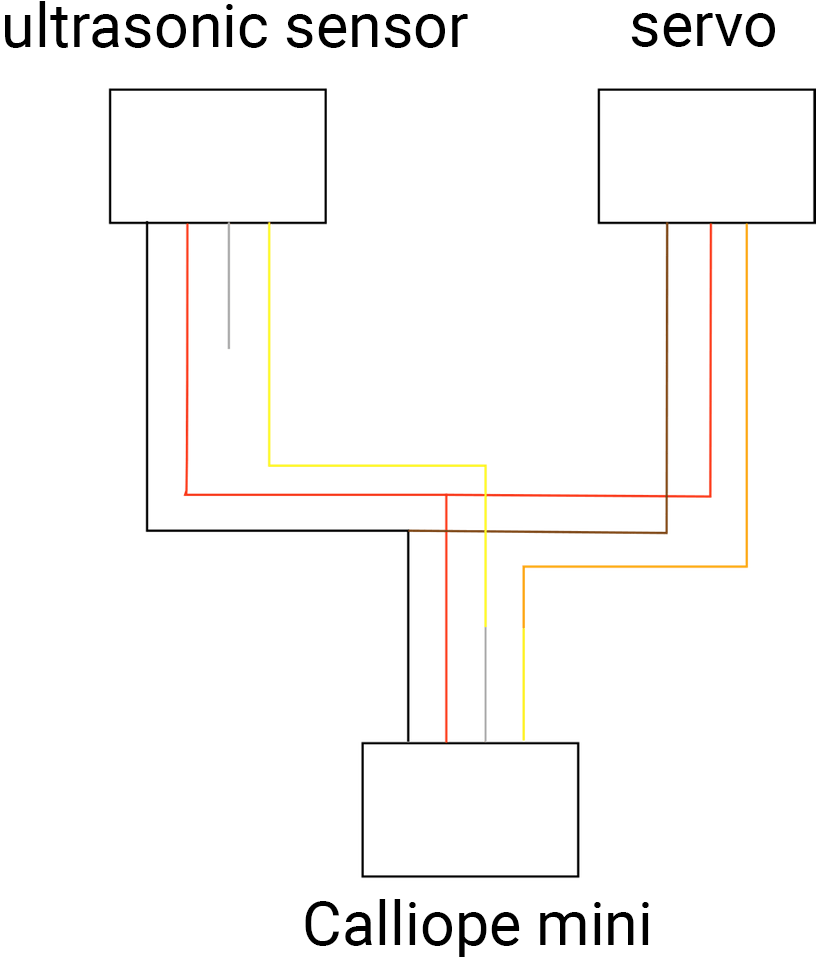
Primero tienes que hacer un cable especial, con el cual puedes conectar el servo así como el sensor ultrasónico al Calliope mini. Ambos componentes se pueden conectar a través de un conector de ranura. El Calliope también tiene dos enchufes para enchufes de ranura, pero sólo uno de los dos puede manejar señales analógicas. La conexión de la arboleda tiene cuatro líneas: tensión de alimentación, tierra y dos líneas de datos. El servo y el sensor de ultrasonido pueden compartir las dos primeras líneas y luego cada uno obtiene una línea de datos. Así que corté el cable de la arboleda que viene con el sensor de ultrasonido en el medio. Si observamos ahora el enchufe Grove, que se conecta a la Calliope miniatura, obtenemos la siguiente asignación: el cable blanco del enchufe va al cable de datos del sensor de distancia ultrasónico (amarillo) y el cable amarillo va al cable de datos del servo (cable naranja del servo). A continuación, el servo se conecta a la clavija C16 de la Calliope mini, el sensor de distancia ultrasónico a la clavija C17. Se conectan los tres extremos rojos (del conector, del sensor y del servo) y los tres extremos a tierra (del conector negro, del sensor negro y del servo marrón). Lo mejor es soldar las conexiones y asegurarlas con tubos termorretráctiles.
Atención: ¡montar el tubo termorretráctil antes de la conexión! Si no tiene un soldador a mano, puede simplemente girar los extremos y pegar una cinta adhesiva alrededor de ellos.
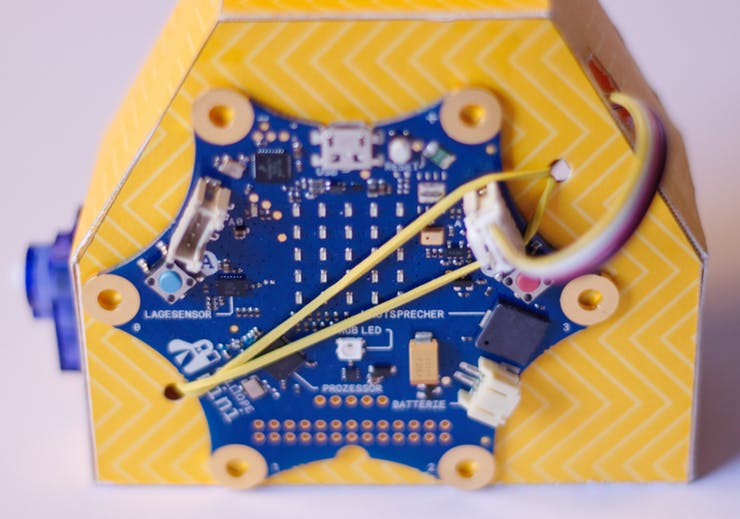
El Calliope mini es simplemente estirado en la parte delantera detrás de la goma.
La instalación del servo es un poco complicada. Primero tienes que insertar el cable desde el exterior a través del agujero en el soporte del servo y luego con cuidado insertar el servo también. El cable desaparece en el hueco del servo soporte.

El sensor de distancia por ultrasonidos se fija con otra banda elástica al soporte correspondiente en la parte superior de la carcasa. Es importante utilizar SeeedStudio versión 2.0 con este sensor porque puede manejar 3.3V (y no sólo 5V).

Ahora sólo tiene que conectar los dos extremos restantes del cable con los enchufes Grove al Calliope Mini (Ranura B) y al sensor. Atención: El enchufe, donde los cuatro cables están ocupados, entra en el Calliope, el enchufe, donde no se utiliza el cable blanco, entra en el sensor.
Programación de la Calliope miniatura
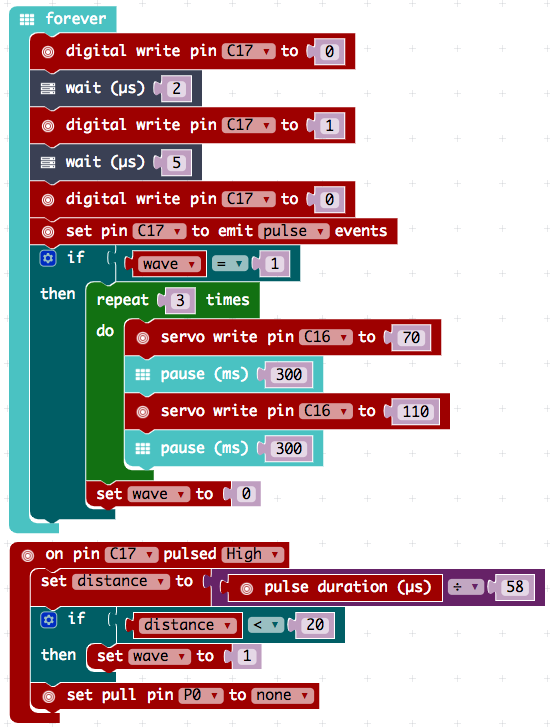
Con el Calliope Mini ahora tienes que dirigirte al sensor de distancia ultrasónico y al servo. Para leer el valor de distancia desde el sensor ya existe una instrucción aquí: ver thisLink de Boris Crismancich. Junto con los comentarios que aparecen a continuación del artículo, se obtienen los dos bloques de código que aparecen a continuación.
Para explicarlo: Para consultar el valor en el sensor de distancia, primero envíe el patrón digital 0-1-0. Luego espere la respuesta ("evento de pulso de emisión"). El segundo bloque tiene la tarea de recoger esta señal de pulso y medir su duración. La duración debe ser convertida en una distancia en centímetros (división entre 58) y comparada con un valor umbral (aquí 20 cm). Si la distancia medida es menor que el valor umbral, la variable wave se convierte de 0 a 1.Esta variable se utiliza en el primer bloque, si tiene el valor 1, como señal de inicio de ondulación. Para ello, el servo se desplaza tres veces de 70 a 110 grados y viceversa. Después de que la ondulación ha terminado, la variable parpadeo se resetea a 0.