Calliope mini Servoboard
Tu propia máquina de chicles, alimentar automáticamente al gato o dejar que limpie tu escritorio...
¡construye tus propias máquinas!
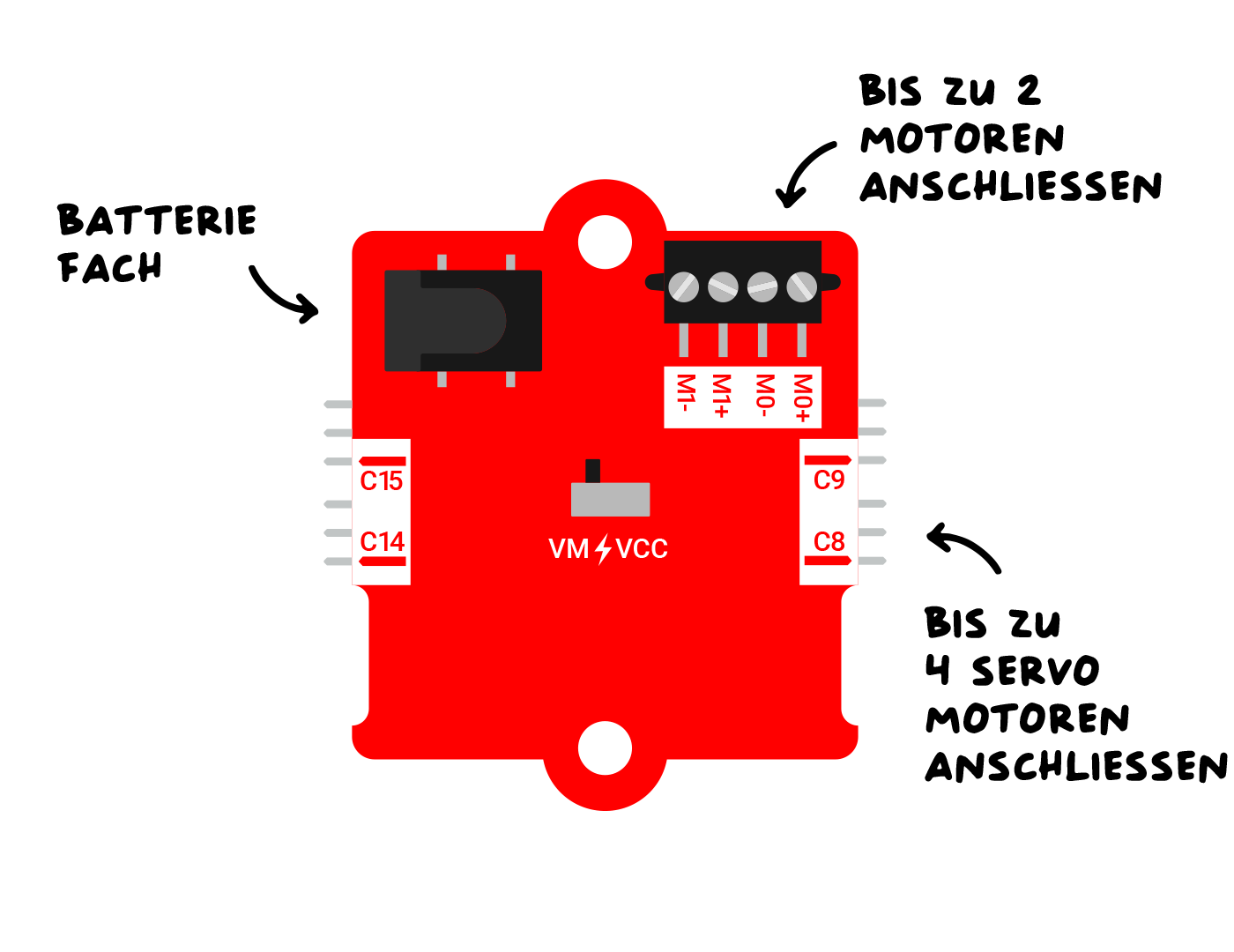
La Calliope mini Servoboard permite controlar hasta 4 servomotores y 2 motores.
Simplemente conéctala y comienza.
Comprar
Comienza de inmediato
Contenido:
Calliope mini Servoboard
Compartimento para pilas (4xAAA)
2 x Ventilador
2 x Servomotor de 360° (R)
2 x Servomotor de 180° (B)

¡Así funciona!
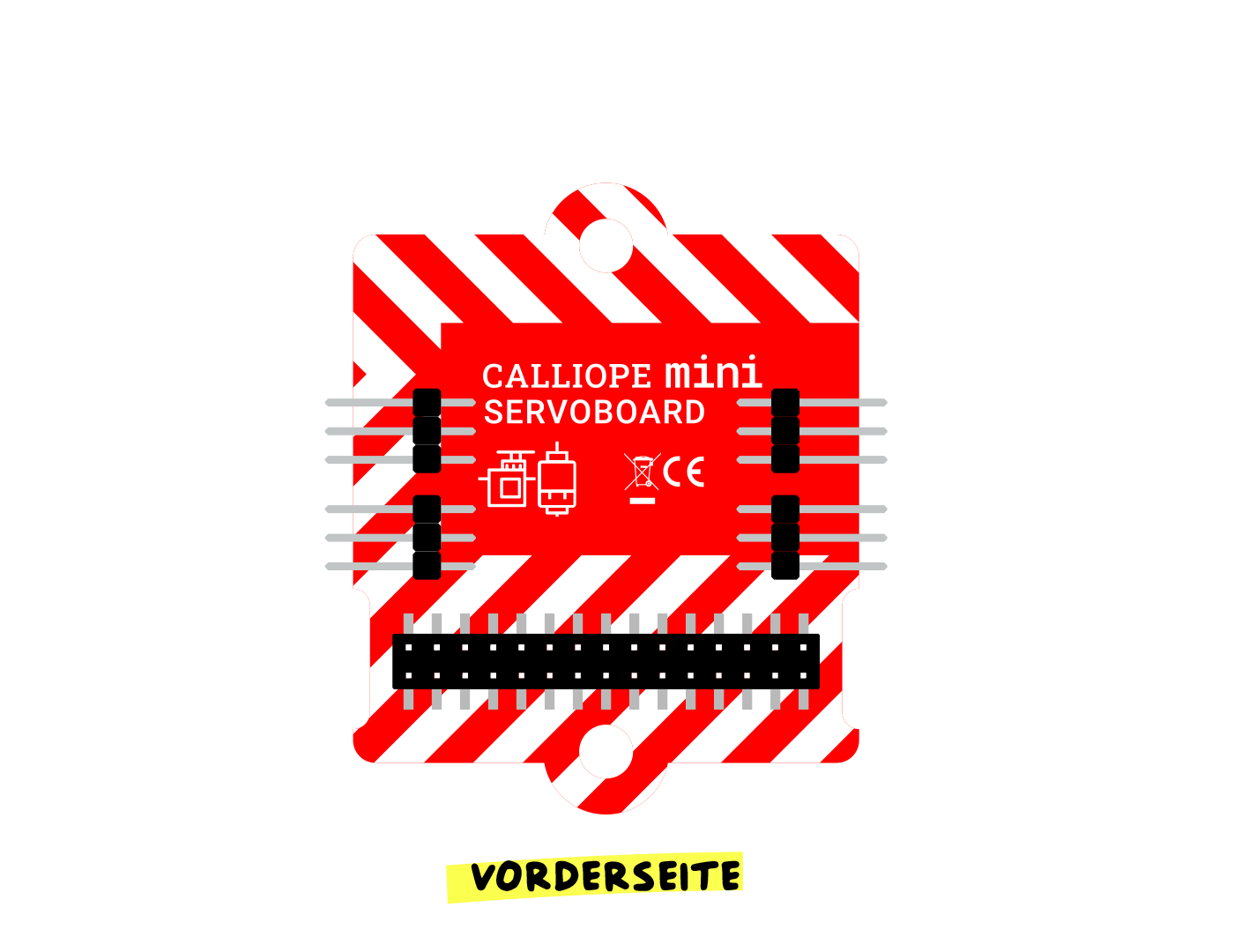
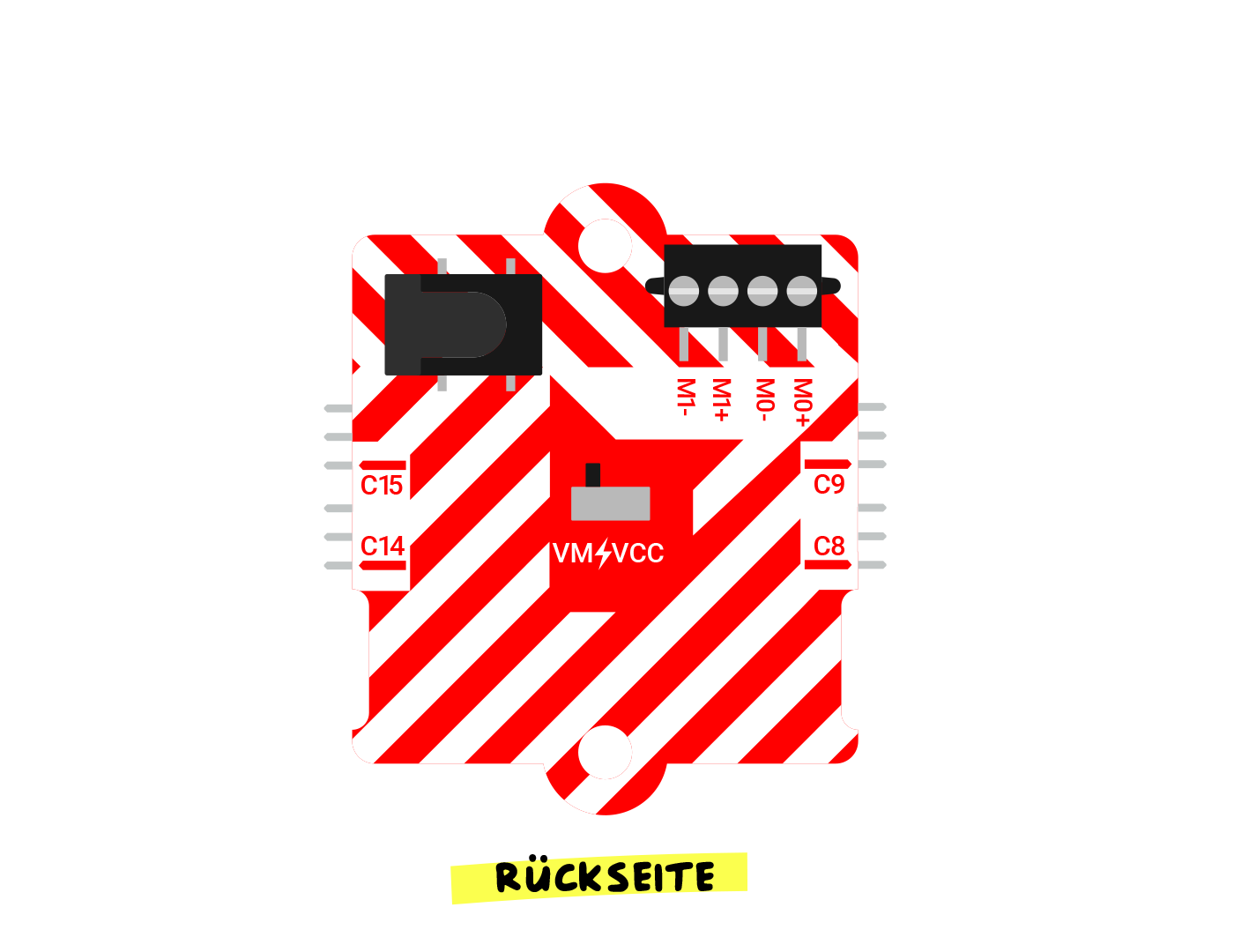
Conectando la Servoboard
Conecta la ServoBoard por la parte trasera en la hilera de pines del Calliope mini.
Servomotores
Conexión

Programación
Los servomotores pueden controlarse directamente con la MakeCode extensión Servo. Carga la extensión en tu biblioteca de códigos.

Motores
Conexión
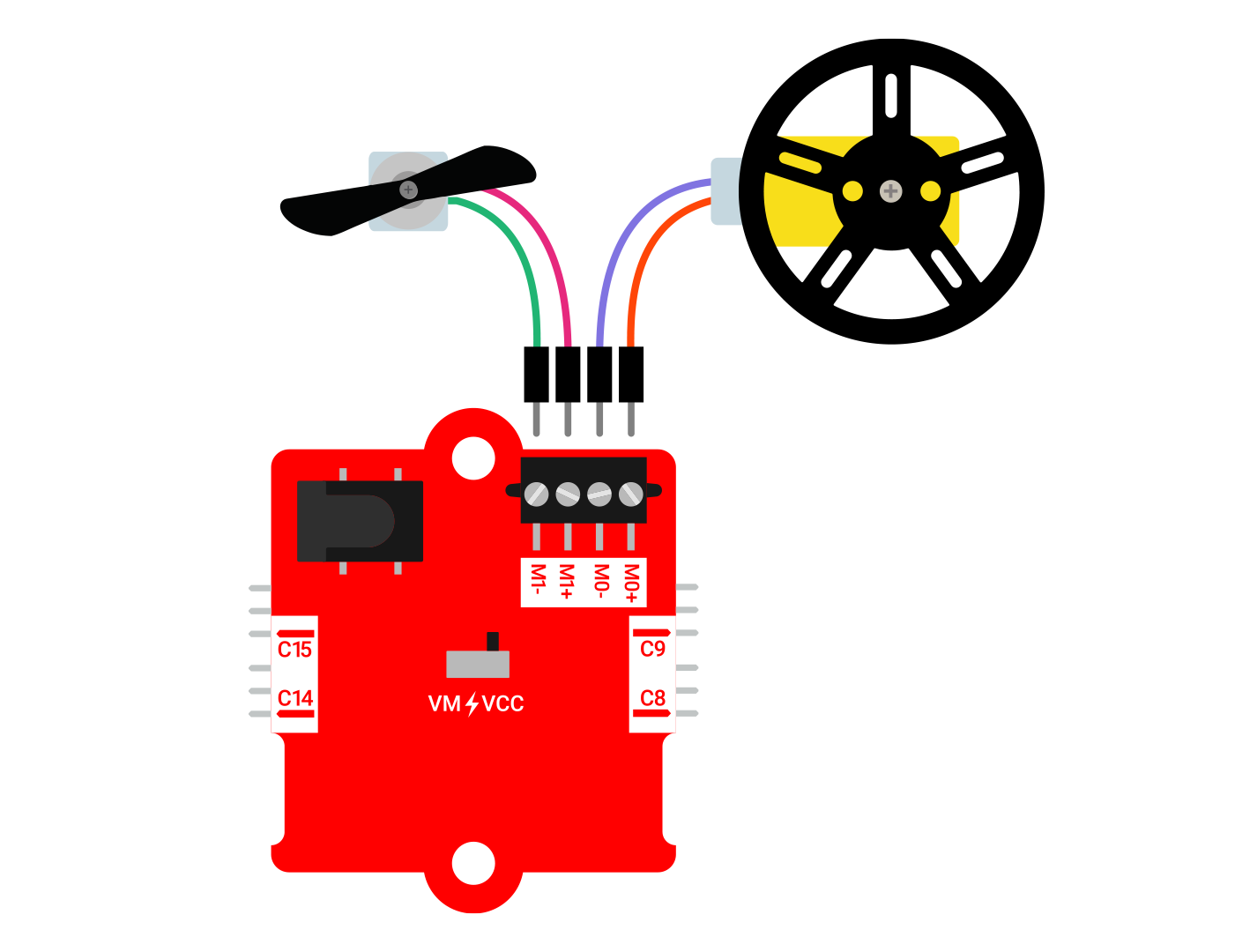

La programación de la ServoBoard es posible con todos los editores que soporten los pines.
FAQ
Se pueden conectar hasta 4 servomotores y 2 motores de corriente continua a la ServoBoard. En funcionamiento, se pueden mover 4 actuadores simultáneamente.
Los servomotores se pueden distinguir por su designación.
R indica el servomotor de 360°. B indica el servomotor de 180°.