Historia
El Calliope mini tiene dos interesantes funciones y componentes de hardware que hacen posible la construcción de un coche con mando a distancia. El módulo de radio y el controlador del motor le permiten controlar dos motores de hasta 9V. Para el Calliope coche con mando a distancia hay que desarrollar un software así como soldar y ensamblar los componentes del coche. Empezaremos con la parte de hardware de la descripción. También puede desarrollar primero el software y al menos probar el mando a distancia.
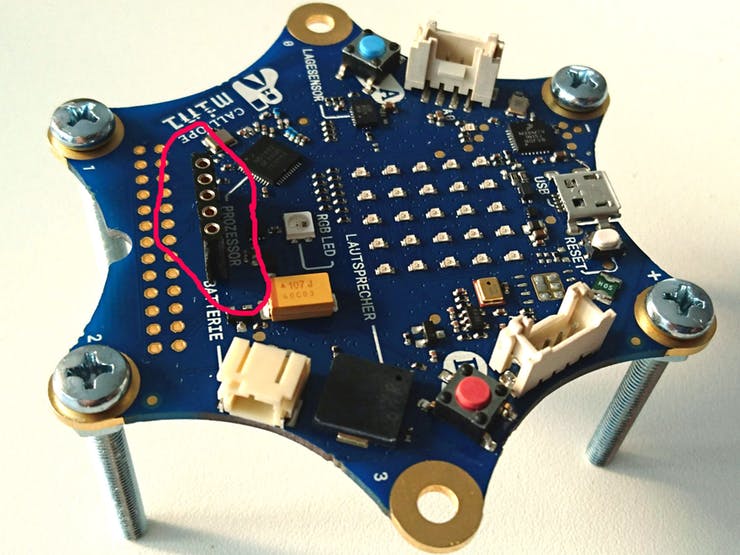
Primero hay que preparar el Calliope, que está en el coche y controla los motores. Para ello soldamos un zócalo con cinco conexiones al Calliope. También puede soldar los cables directamente en el Calliope lugar. La opción con el conector hembra es más elegante, ya que puede desconectar los motores más tarde si no desea utilizarlos más en su Calliope equipo, o si desea montar algo más.
A continuación, suelde los cables a los motores si aún no los tienen, o si son demasiado cortos. Piense en dónde estará Calliope en su coche, y dónde estarán los motores, para que los cables sean lo suficientemente largos. En el otro extremo de los cables hay conectores soldados. En lugar de utilizar una tira con dos clavijas para cada motor, también puede utilizar una con cinco clavijas (motores + batería).
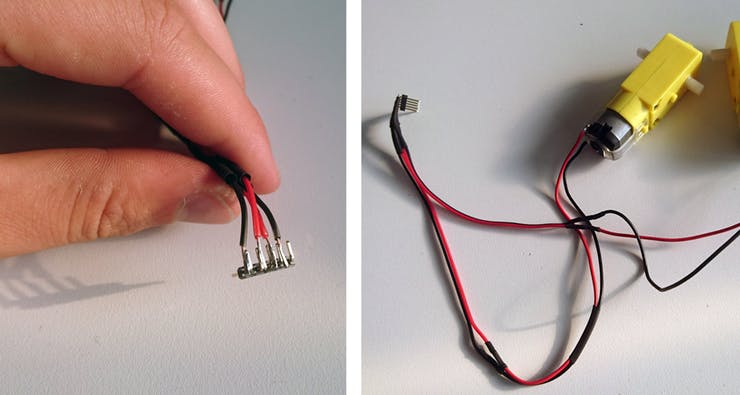
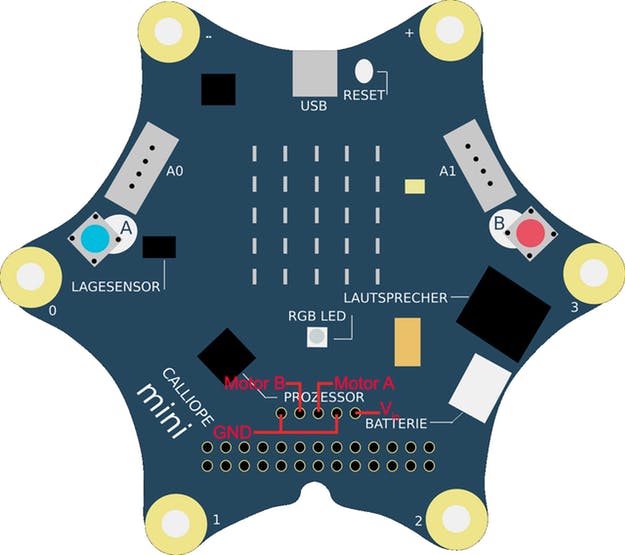
Las conexiones de la regleta de conectores Calliope de izquierda a derecha son: GND, Motor B, Motor A, GND, V_in. Por lo tanto, hay que soldar los motores a la regleta de conectores para que un motor esté en el pin 1 y el pin 2, el otro en el pin 3 y 4.la conexión en el extremo derecho pueda permanecer libre por el momento. Aquí se puede conectar la batería adicional más tarde.
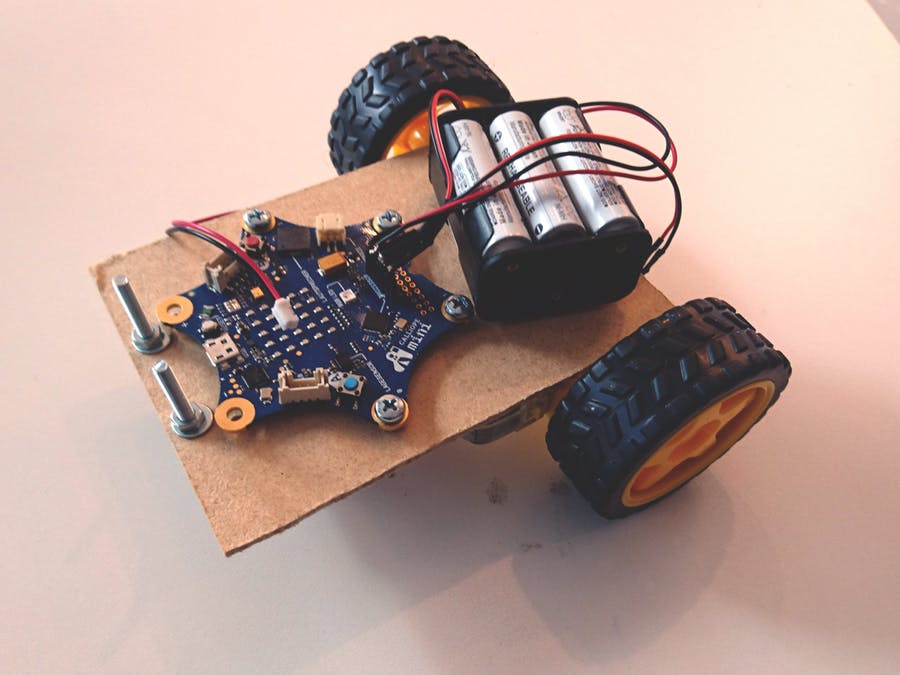
Ahora puede montar su coche. Si no tiene un chasis terminado, una simple placa de madera le servirá. Serramos una pieza de 10 cm x 13 cm de una placa de madera contrachapada y la utilizamos. Puede simplemente fijar los motores a la placa con pegamento caliente.
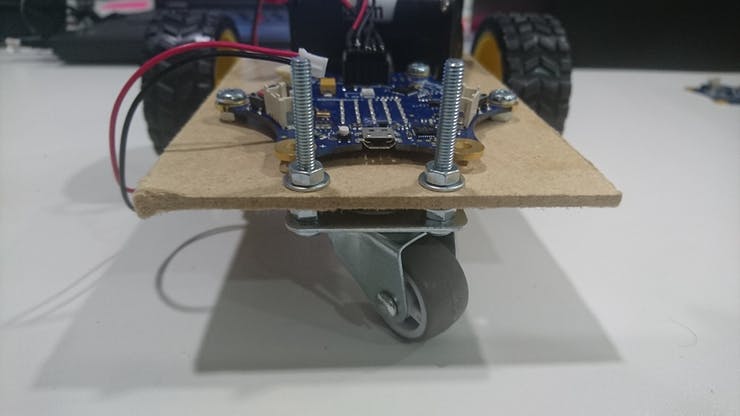
También se puede fijar Calliope con pegamento caliente si es necesario. Pero asegúrese de usar la menor cantidad de pegamento posible y sólo en las puntas del controlador. De esta manera, si es posible, se puede sacar de la tabla de madera sin dañarla. Es mejor taladrar algunos agujeros en el tablero de madera y fijarlo Calliope con tornillos y tuercas. Los tornillos con un diámetro de 4 mm encajan perfectamente en las puntas de la calliope.

Ahora necesitas una tercera rueda. Usamos un rollo de muebles para esto. Son excelentes, porque se mueven fácilmente en todas las direcciones y al mismo tiempo no crean mucha resistencia al conducir. Si es necesario, también puede utilizar una pelota de tenis de mesa si sólo desea rodar sobre superficies lisas como el parquet o un tablero de mesa.
Ahora deberías probar tus motores. Escriba un programa sencillo para ello. Por ejemplo, puede encender los motores uno tras otro durante un número infinito de veces durante un segundo cada uno y luego apagarlos de nuevo durante un segundo. ¿Giran ambos motores para que el coche se mueva hacia adelante?
Si no es así, hay que invertir la polaridad de los motores. Basta con cambiar las clavijas de la regleta de conectores tirando brevemente de ellas y volviéndolas a conectar en el punto adyacente. Por lo tanto, para el motor B, cambie los pines 1 y 2 y para el motor A, cambie los pines 3 y 2. 4.
Si ya funciona, podemos empezar a programar ahora.
El mando a distancia
El Calliope, que sirve de mando a distancia, convierte el valor del sensor de movimiento en números para la velocidad de los motores. El eje X determina la dirección a izquierda y derecha, el eje Y la velocidad. Así que simplemente se Calliope puede inclinar hacia delante para acelerar el coche y hacia atrás para reducir la velocidad. La inclinación hacia la izquierda o hacia la derecha dirige el vehículo en consecuencia.
En primer lugar almacenamos los valores del sensor de posición en una variable. Podemos poner esto en un bucle "permanente" de inmediato. El eje X determina más tarde la dirección del coche, el eje Y la velocidad. Aquí el bloque "Distribuir..." es bajo... de bajo... de alto... de bajo... a bajo... a bajo... a alto..." es muy útil. De esta manera, el amplio rango de valores del sensor se convierte inmediatamente en un rango de números deseado. El sensor emite valores de -1023 a 1023. Para la dirección queremos valores de -50 a 50 y para la velocidad de 0 a 100., ya que las velocidades del motor se indican más tarde en porcentaje.
Para probar el programa con un Calliope, mostraremos los valores con un truco. Un punto LED nos muestra la dirección en la que se mueve a la izquierda y a la derecha, o la velocidad moviéndose hacia adelante/arriba (rápido) y hacia atrás/abajo (lento). Aquí también el bloque "Distribuir" ayuda. Distribuimos los valores de la dirección (-50 a 50) a una coordenada X de la matriz LED (0 a 5) y los valores de la velocidad (0 a 100) a la coordenada Y de la matriz LED (5 a 0). ¡Atención! Para la coordenada Y tenemos que contar de 5 a 0! Dado que el punto 0/0 de los LEDs se encuentra en la parte superior izquierda, no en la parte inferior izquierda como es habitual. De lo contrario, la pantalla estará al revés.
Ahora apague el LED al principio del bucle y, según nuestros cálculos, encienda el nuevo LED. Ahora puede comprobar si el punto LED se mueve a través de la pantalla inclinando el calíope!
Para que el mando a distancia esté listo, nuestros dos valores de dirección y velocidad deben seguir transmitiéndose por radio. También recuerde establecer un grupo para la radio cuando inicie el programa. También puede ajustar la intensidad de transmisión a "7". Entonces el rango es un poco más alto. El programa terminado se verá así:
El coche
El programa en el coche recibe sólo los datos y controla los motores con diferentes velocidades en consecuencia.
Por supuesto, lo primero que tenemos que hacer es guardar los datos recibidos. Utilice diferentes variables para "dirección" y "velocidad". También se debe fijar el grupo apropiado.
Para ver si la transmisión funciona correctamente, debe encender un punto LED que se mueva a través de la pantalla, igual que con el mando a distancia.
Si esto funciona, ahora también puede controlar los motores. Calcule la velocidad de cada motor de la siguiente manera:
Motor izquierdo = "velocidad" + "dirección
Motor derecho = "velocidad" - "dirección".
Atención, por el momento puede suceder que la velocidad de un motor puede llegar a ser mayor de 100.. Compruebe esto, y si es necesario, simplemente ajústelo a 100.. También puede volverse más pequeño que 0.También compruebe esto, y ajústelo a 0 si es necesario.
Este problema se produce, por ejemplo, al inclinar el calliope del mando a distancia hacia la derecha. Entonces el valor para la dirección es 50 y para la velocidad 100. Para el motor izquierdo resultaría un valor de 150. Tenemos que corregir eso, porque un motor sólo puede girar al 100% como máximo.
Si usted tiene todo eso, su programa se ve así:
Más potencia para los motores con baterías adicionales:
Mientras tanto, su Calliope coche debería conducirse y también controlarse con el mando a distancia. Sin embargo, los motores sólo funcionan con los 3V que Calliope tienen las dos baterías. Puede conectar una batería adicional para aumentar el voltaje y hacer que el coche conduzca más rápido.
En la regleta de conectores hay una clavija (V_in) libre. Allí tiene que soldar el polo positivo de su batería adicional (máx. 9V, es decir, máx. seis baterías AA). Conecte el minipolo a GND. Así que directamente a uno de los dos pines GND a los que están conectados sus motores, o al polo negativo de su Calliope (la punta con el "-").
Puede hacer clic aquí para ver cómo se ve el coche en acción popup: yes
Este texto, así como la imagen, se publica bajo el nombre de CC BY-NC 4.0 DE licencia popup: yes. It was originally publicada en alemán popup: yes by Mario Pesch popup: yes, Junge Tueftler y traducida al inglés por el Calliope equipo.