
Características especiales
El robot de pintura puede programarse de diferentes maneras: Pintar pulsando un botón, al azar o incluso pintando, dependiendo de la hora del día o de la temperatura ambiente.
Es bueno saberlo
Deberías haber trabajado con el Calliope antes de empezar este proyecto.
Llegarás a saber que
Aprenderás a controlar motores con el Calliope y cómo construir un brazo robot de cartón y palillos de dientes. En pocas palabras, ¡aprenderá a construir robots!
Haga clic aquí para ver un video tutorial popup: yes
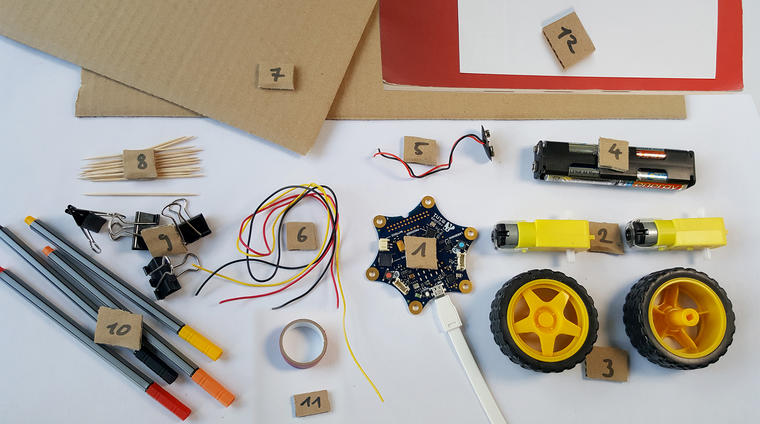
MATERIALES
- tu Calliope Mini
- dos motores de engranajes para robots (3-6 voltios)
- dos neumáticos adecuados (¡están disponibles en el juego con los motores!)
- un portapilas y cuatro pilas AA (6 voltios)
- un clip de batería para el soporte de batería
- cables de colores
- caja de cartón (aprox. 50cm x 50 cm)
- palillo
- Clips para doblar hacia atrás
- lápiz de color (lápices finos)
- cinta aislante
- un libro viejo (o algo similar)
HERRAMIENTAS
- un cuchillo de corte
- una regla (como ayuda para cortar)
- un buen par de tijeras
- un pelacables (preferiblemente un pelacables "automático")
- una pistola de pegamento caliente

Consejo: Es un poco difícil fijar los cables del motor al Calliope. La mejor solución es colocar el "Solderless Hammer Header" en los ojales. Puede obtenerlos en la tienda online en inglés de Pimoroni. A continuación, puede utilizar cables de placa base ordinarios para la conexión.
Antes de empezar, usted debe hacer una pequeña prueba con el suyo Calliope para asegurarse de que funciona. Para saber cómo programar el programa, haga clic Calliope aquí: http://calliope.cc/


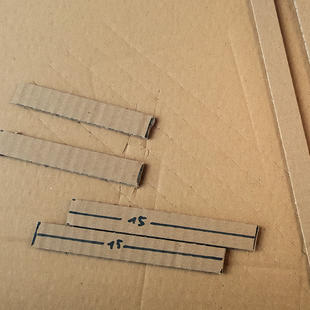
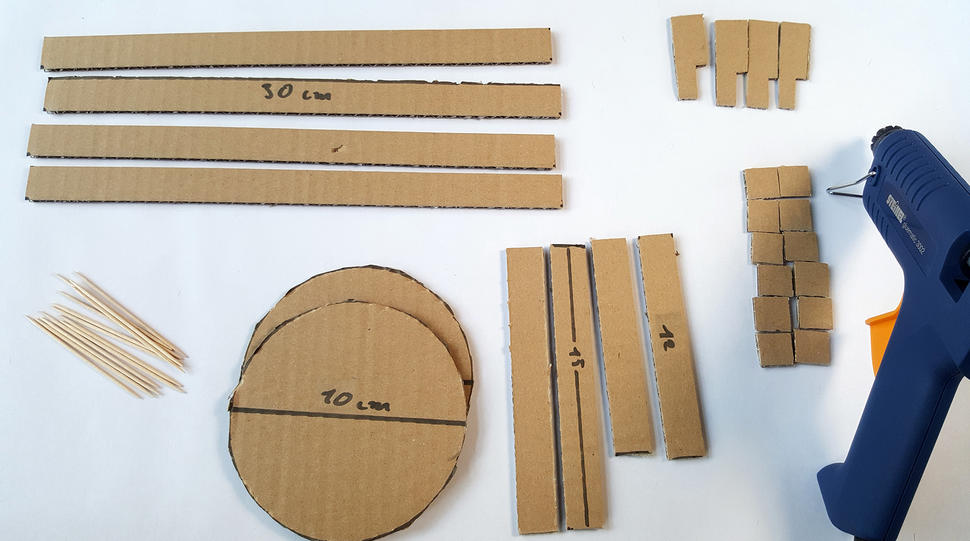
1: CORTAR EL CARTÓN
Cortar 6 tiras de cartón de unos 30 cm de largo y 2 cm de ancho.
A continuación, se dividen dos tiras en cuatro trozos de 15 cm de largo cada uno. Cortar otros 3 cm de dos tiras.

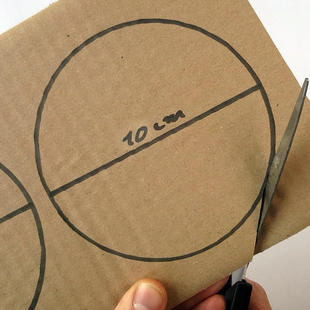
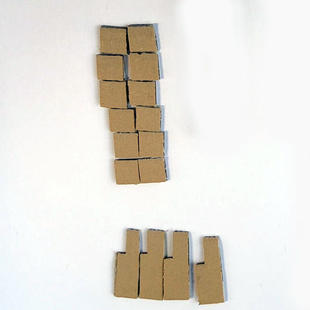
Cortar con tijeras dos discos de 10 cm de diámetro. Además, necesita al menos 12 cuadrados con una longitud lateral de unos 1.5 cm y cuatro piezas - como se muestra en la imagen - para el portabolígrafos. El extremo más delgado está allí para que la abrazadera plegable pueda sujetarse a ella más tarde.
2: PEGAR LAS PIEZAS ENTRE SÍ
Ahora recoge todas las piezas de cartón preparadas, incluidos los palillos de dientes y la pistola de pegamento caliente. ¡Ahora ensambla el brazo!
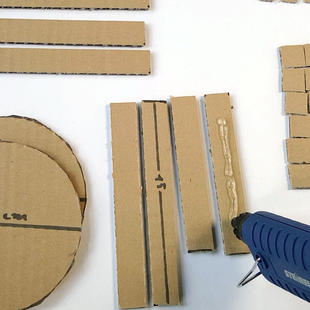

Cómo pegar: Asegúrese de no pegar al menos 1 cm al principio y al final de cada tira. Aquí es donde los palillos de dientes pasan más tarde.
Pegue las dos tiras cortas juntas, las dos tiras de 15 cm y dos de las cuatro tiras de 30 cm. Las cuatro piezas con el extremo más delgado se unen!
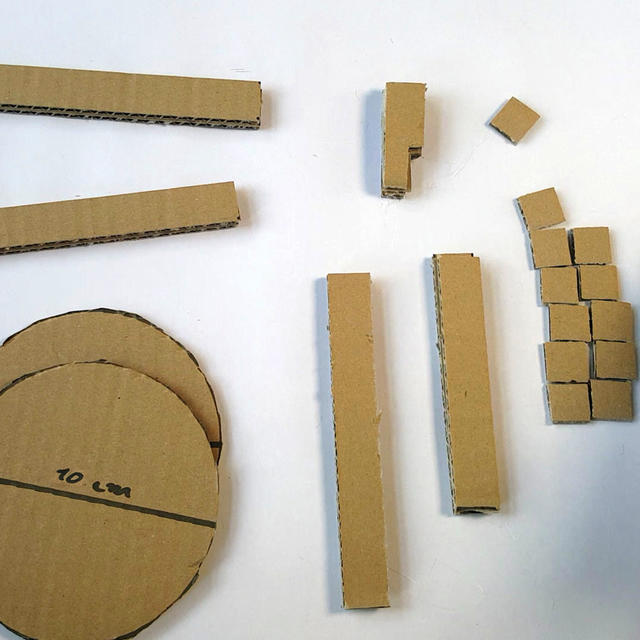
Así es como lo hemos hecho:
Dos piezas largas
Una pieza con 15 cm
Una pieza de aprox. 12 cm
También un portalápices con 4 capas
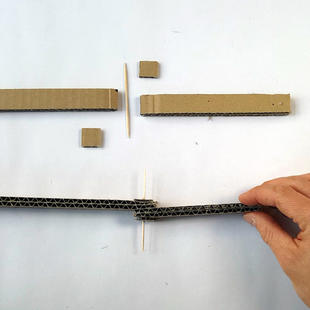
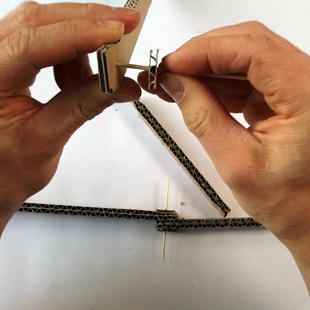
3: CONSTRUCCIÓN DE LAS ARTICULACIONES
Atención, ahora se está volviendo un poco más difícil. Ahora pegamos palillos de dientes a través de las partes de cartón para construir las articulaciones. Esto necesita algo de práctica. Cuida tus dedos y usa un trozo de cartón de repuesto como base para perforar.
Una junta siempre consiste en un pequeño cuadrado en la parte superior, las partes que deben conectarse en el centro, y otro cuadrado en la parte inferior. Cortamos los palillos que sobresalen, pero dejamos que sobresalgan unos pocos milímetros del palillo.
Consejo: Con un alfiler de dibujo o una aguja puede perforar los agujeros, si los palillos no están lo suficientemente afilados.


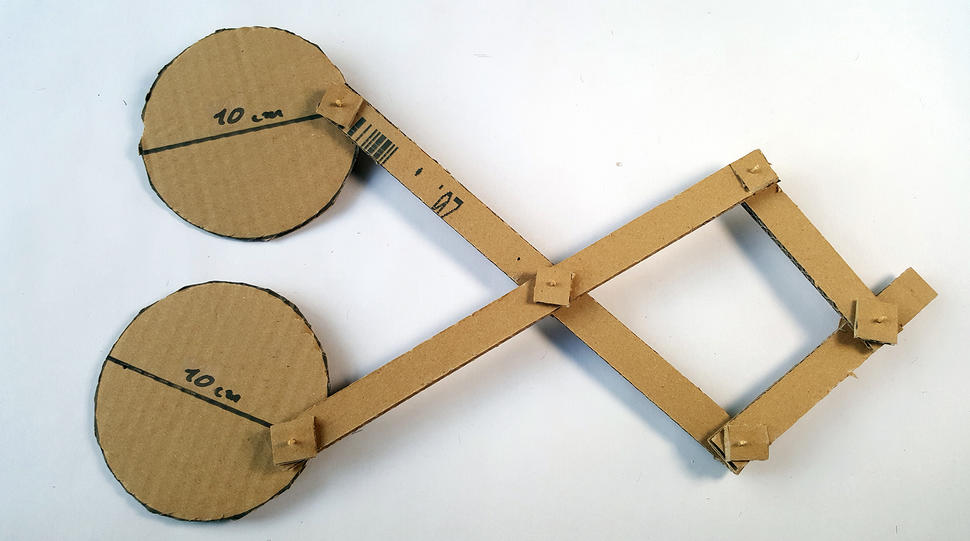
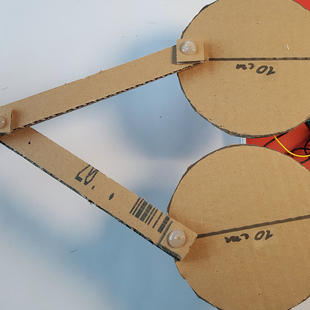
Aquí puede ver cómo debe ser el brazo del robot. Compruebe si ha hecho todo bien antes de continuar.
Consejo: El punto en el que se conectan las dos partes largas no debe estar exactamente en el centro. Es mejor si la articulación está ligeramente desplazada. La parte más larga debe apuntar en la dirección de los discos redondos!
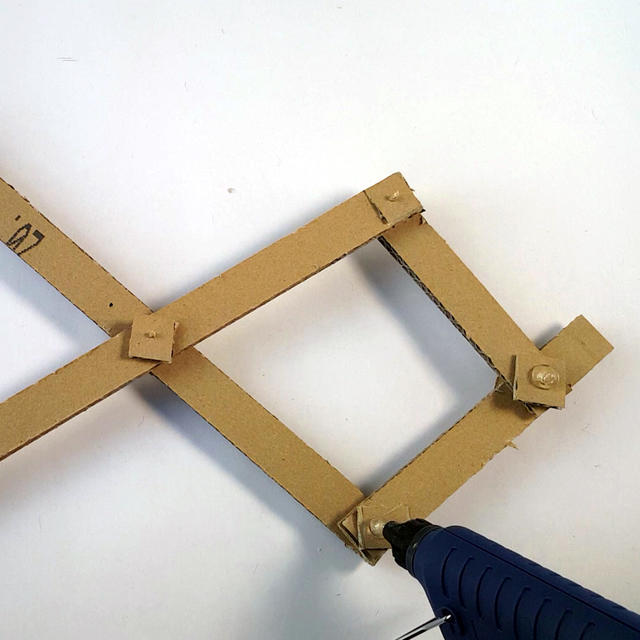
4: COMPLETAR EL BRAZO DEL ROBOT
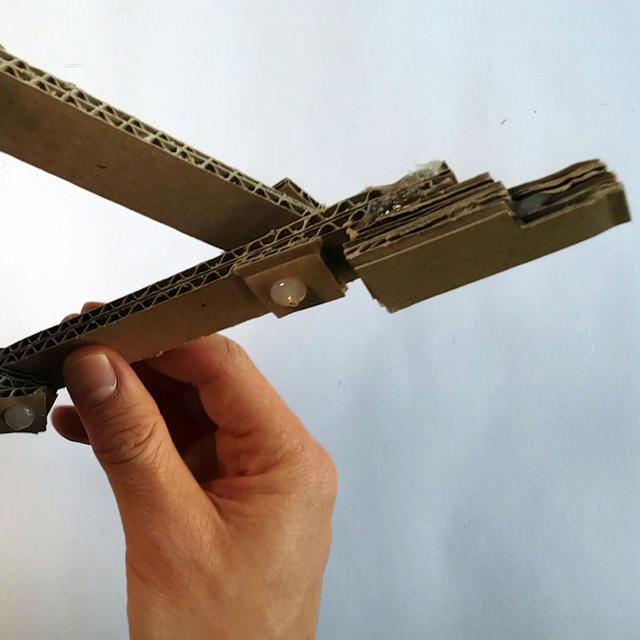
Se aplica una gota gruesa de pegamento caliente en cada extremo del palillo de dientes para que el cuadrado pequeño quede bien sujeto. Esto es importante para evitar que los palillos se salgan.
Recuerda: Cuando haya pegado todos los palillos de dientes en la parte superior, deje que el pegamento se enfríe y pegue todos los palillos de dientes en la parte inferior.
Pegue el portalápices en el extremo del brazo del robot.
Importante: Pegue el portalápices al otro lado de la última junta. Así que no dónde está la última parte.
Su brazo robot ya está listo. Pruebe si todas las articulaciones se mueven..... Entonces puedes continuar
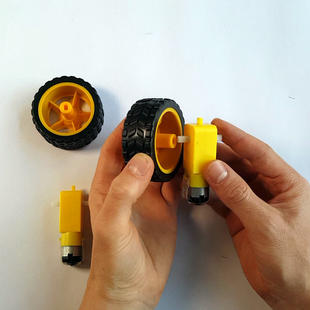

5: PREPARACIÓN DE LOS MOTORES
Ponga los neumáticos en los motorreductores.
A continuación, preparar 4 cables: Dos amarillas y dos negras. Aísle algo de la cubierta en ambos extremos para exponer el cable. La mejor manera de hacer esto es usar un stripper automático, igual que nosotros.
Ahora inserte los extremos de los cables abiertos a través del ojal del motor. Puede que tenga que hacer girar las hebras, los pequeños alambres del cable. A continuación, doble el extremo del cable de modo que no pueda deslizarse fuera del ojal. La mejor manera de hacerlo es envolverse con el extremo del cable doblado alrededor de uno mismo. Ahora puede soldar la conexión. Tenga cuidado y busque un tutorial.

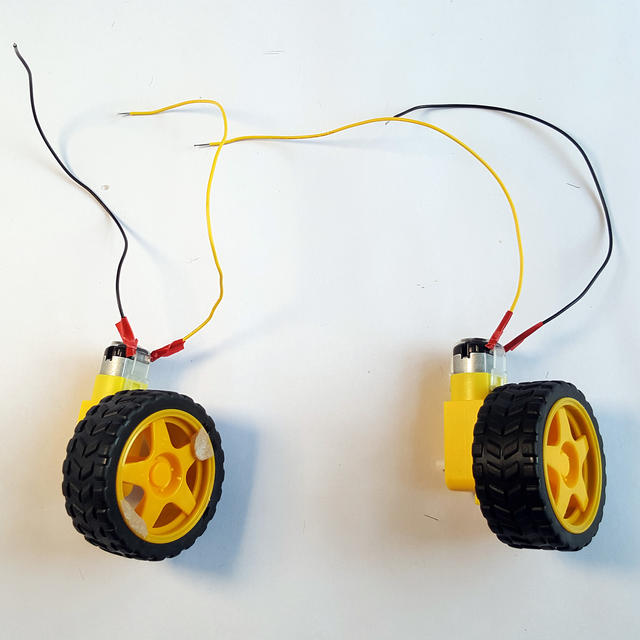
Cada motor está conectado por un cable de color y por un cable negro. Hemos aislado los extremos de los cables abiertos con cinta aislante.
(...columns)
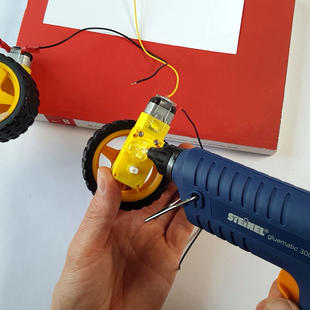
6: MONTAR LOS MOTORES
Ahora pegamos los discos con pegamento caliente. Por ejemplo, en un libro viejo. Asegúrese de que el eje del motor en la parte inferior pueda girar libremente y no se pegue.



7: PREPARAR LAS PLUMAS
Los bolígrafos se pegan al clip de plegado a la vez. La altura del clip de plegado en el pasador corresponde a la altura a la que los neumáticos están pegados al suelo.
Luego sujeta un bolígrafo a nuestro portabolígrafos en el brazo del robot.
8: PEGAR EL ACCIONAMIENTO
Con cola caliente pegamos ahora los dos discos del brazo del robot a los neumáticos. Cuando el pegamento se haya enfriado, puede girar los dos discos a mano y comprobar si el brazo se está moviendo.
Importante: Asegúrese de pegar los discos de modo que el brazo del robot esté montado en la parte superior de los discos. De lo contrario, el disco no puede girar libremente.

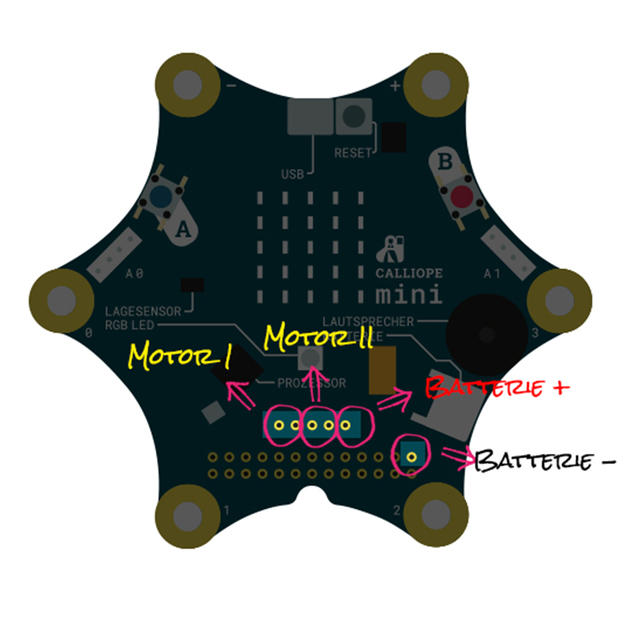
9: CONECTE LOS CABLES
Así es como se conectan los motores. No importa cuál de los dos cables del motor se conecta en el ojal. Al contrario, puedes jugar con él, porque invierte el sentido de rotación!
Es importante que los motores necesiten una batería adicional (6V). Conéctelo como se muestra en la imagen.
En principio, ahora tiene tres opciones:
- Puedes soldar los cables al calíope. Pero sólo aconsejamos a los profesionales que lo hagan.
- La mejor opción es equipar el equipo Calliope con los "Solderless Hammer Headers" y utilizar cables de protoboard.
- Pero si no tienes todo eso, hay un truco que puedes hacer con palillos de dientes. Preste especial atención al riesgo de cortocircuito que se menciona a continuación.
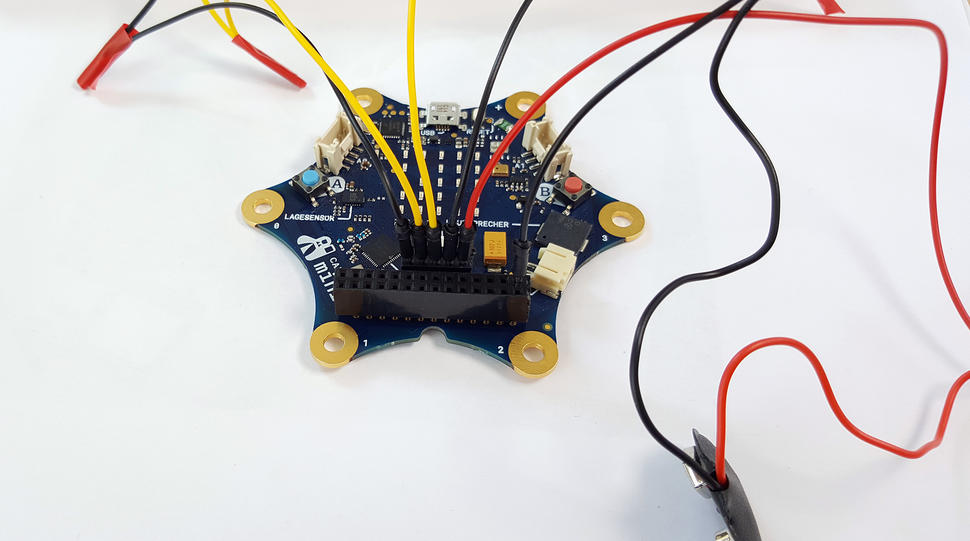
SOLUCIÓN CON RANURAS
Esta es la solución con el cable de la protoboard y el "Solderless Header". Hemos preparado los cables de la siguiente manera:
Divide un cable de la protoboard para obtener dos enchufes. A continuación, los extremos abiertos se quitan. Entonces podemos retorcerlos con la batería y los cables del motor. Si se sujetan bien, se envuelven con cinta aislante para evitar un cortocircuito. También puede soldar estas conexiones "enroscadas" porque puede desconectar los enchufes de las clavijas en cualquier momento.
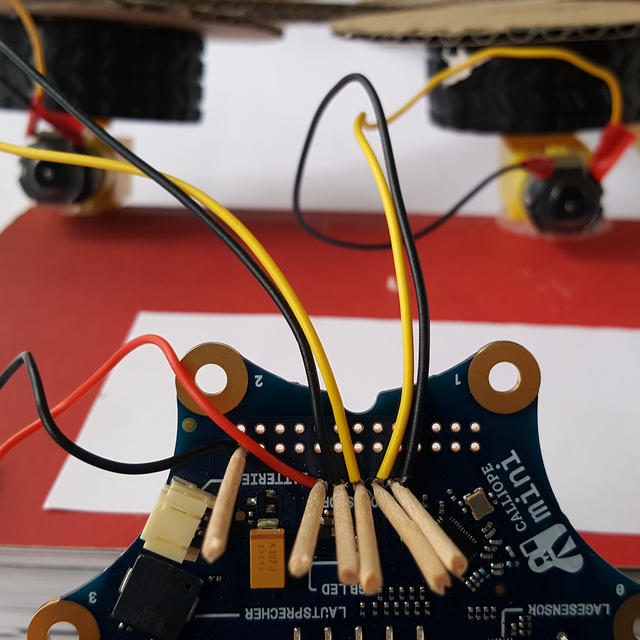
SOLUCIÓN SIN RANURAS
La solución con palillos de dientes: Simplemente inserte primero el extremo abierto del cable en el ojo y luego agregue un pedazo corto de palillo de dientes. Esto mantiene el cable en el ojal.
Consejo: Si sus cables son un poco más gruesos, puede ser útil afilar los palillos de dientes con un cuchillo. Haga que los palillos sean cortos para que no se caigan tan rápido.
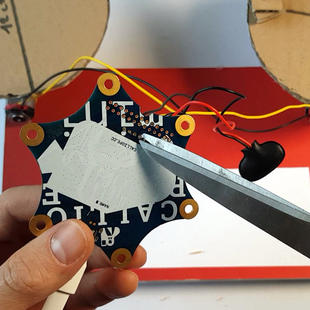
Atención ¡Peligro de cortocircuito!
Los extremos de los cables que sobresalen de la parte inferior de la calliope deben ser retirados.
Si uno de los cables toca un ojal adyacente, se producirá un cortocircuito más tarde y es posible que tenga un Calliope Mini defectuoso. Por lo tanto, corte los extremos de los cables en la parte inferior lo más corto posible. Un palillo de dientes puede ayudar a"clasificar" los alambres pequeños.
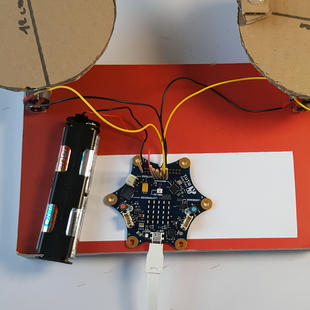

10: CONECTE LA BATERÍA Y EL ORDENADOR
Ahora conecte la batería. Luego conecte la tarjeta a su computadora. Coloque el robot de pintura sobre una superficie libre y extiéndalo con papel.
Consejo: Se necesitan dos fuentes de alimentación para hacer funcionar el robot de pintura: El portapilas suministra energía a los motores, pero el Calliope mismo también necesita energía. Recibe esta energía ya sea de la computadora, con el cable USB conectado, o del pequeño portabaterías que viene con el Calliope.
11: PROGRAMACIÓN DEL ROBOT DE PINTURA
Para la codificación, vaya a https://makecode.calliope.cc y elija su versión del Calliope.
Aquí puede ver nuestro código de ejemplo para probar el robot de pintura. Los botones A y B de cada Calliope uno activan un motor del robot de pintura. Construya el código exactamente de la misma manera y descargue el archivo. Luego copia el código a tu Calliope. Si tiene problemas con este paso, puede encontrar muchas buenas instrucciones aquí: https://calliope.cc/en/anleitungen
Consejos de programación
Los motores pueden funcionar a una velocidad de 0 a 100 por ciento. En los 6 voltios conectados, un valor entre 55 y 70 es un buen comienzo. A partir de los 70, los motores se vuelven tan rápidos que el robot de pintura puede desintegrarse en sus partes individuales. Por debajo de 50, la potencia del motor es a menudo insuficiente. Estos valores cambian ligeramente con la batería vacía. A continuación, puede ajustar los valores más altos.
Por cierto, el robot de pintura funciona mejor cuando los dos motores giran a diferentes velocidades. Pruébalo!
12: LA PRIMERA PRUEBA
Coloque el robot de pintura sobre el papel y pulse los botones A y B del Calliope. Ambos motores deben girar.
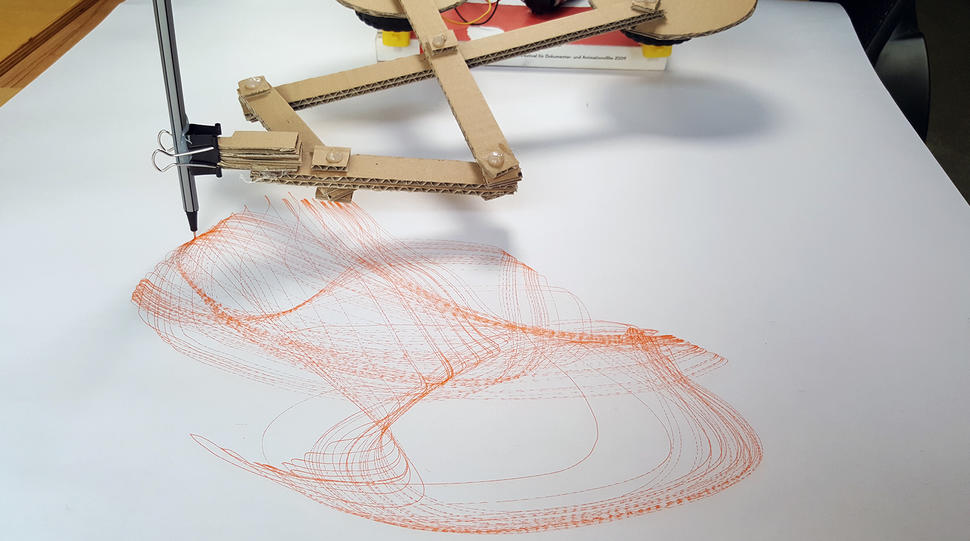
El robot de pintura en acción
Haga clic aquí para ver un vídeo del robot de pintura en acción. popup: yes
Este texto, así como la imagen, se publica bajo el nombre de CC BY-NC 3.0 DE licencia popup: yes. It was originally publicada en alemán popup: yes by tuduuu popup: yesy traducida al inglés por el Calliope equipo.